AIニュース 2026-06-04
自動生成: 2026-06-04 13:41 JST
過去24時間以内に公開された記事を、同じ話題ごとに1つのストーリーカードへまとめ、出典・トピック・要約とともに掲載しています。要約は各フィード提供文の冒頭を整形したもので、本文は各リンク先をご覧ください。
📌 今日の要点 TOP7
-
Introducing new capabilities to GPT-RosalindOpenAI
GPT-Rosalind advances life sciences research with enhanced biological…
-
How Wasmer used Codex to build a Node.js runtime for the edgeOpenAI
See how Wasmer used Codex with GPT-5.5 to build a Node.js runtime for…
-
OpenAI public policy agendaOpenAI
OpenAI outlines its public policy agenda for AI, including safety, yo…
-
A blueprint for democratic governance of frontier AIOpenAI
OpenAI outlines a blueprint for U.S. governance of frontier AI, propo…
-
Google Chromeの新機能「Skills」 AIプロンプトの“毎回手打ち”を不要にITmedia AI+
GoogleはChrome向けのAI新機能「Skills in Chrome」を発表した。AIプロンプトを保存してワンクリックで再利用可能…
-
オートデスク、主要製品向けにAIアシスタント機能を展開 Fusion向けMCPもITmedia AI+
Autodeskは、主要製品向けに「Autodesk Assistant」のテックプレビュー版を提供する他、Fusion向けのMCPを公開…
-
Claude Opus 4.8は忖度(そんたく)しません “正直すぎる”のも善しあし?ITmedia AI+
Claude Opus 4.8は、性能向上だけでなく「正直さ」の改善が大きな特徴だ。本稿では、忖度(そんたく)しないAIがなぜ評価を分けて…
トピック別件数
- LLM/生成AI 171件
- 研究/論文 144件
- エージェント 93件
- 画像/動画生成 68件
- ロボティクス 22件
- ビジネス/資金調達 18件
- ハードウェア/半導体 10件
- その他 9件
- 規制/政策 3件
日本語メディア10件
ITmedia AI+ (日本語)
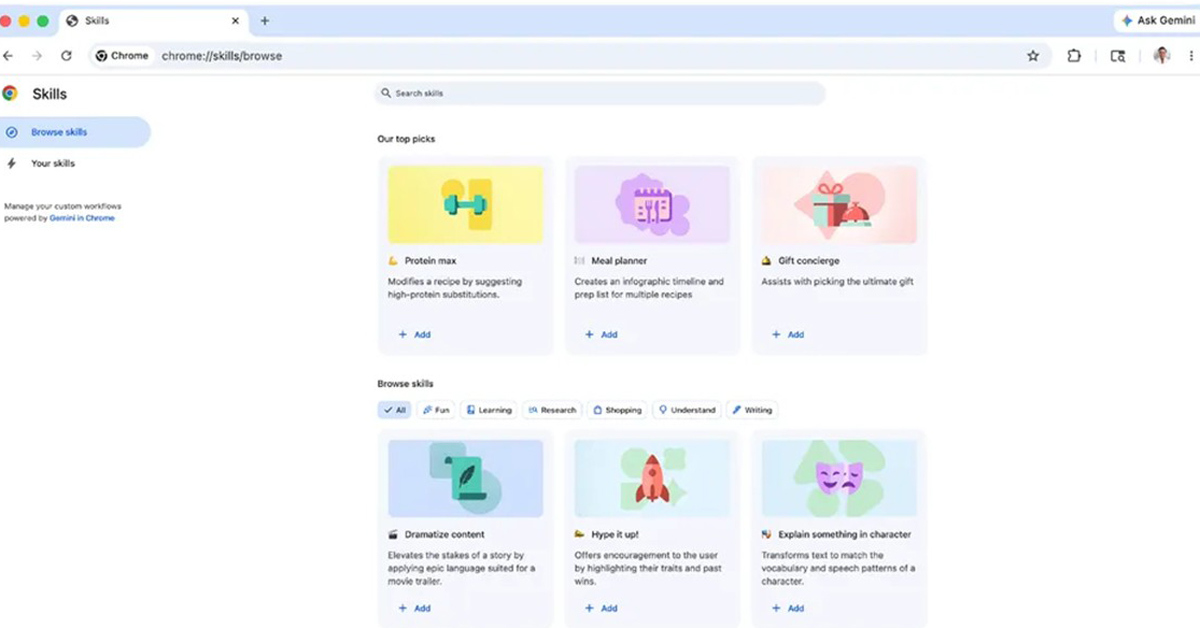
Google Chromeの新機能「Skills」 AIプロンプトの“毎回手打ち”を不要に
GoogleはChrome向けのAI新機能「Skills in Chrome」を発表した。AIプロンプトを保存してワンクリックで再利用可能にするという。
日本政府、AI「Mythos」アクセス権を取得 サイバー防衛強化に活用
三菱UFJ銀行、三井住友銀行、みずほ銀行もアクセス権を得たとみられている。

オートデスク、主要製品向けにAIアシスタント機能を展開 Fusion向けMCPも
Autodeskは、主要製品向けに「Autodesk Assistant」のテックプレビュー版を提供する他、Fusion向けのMCPを公開した。設計データや業務コンテキストを理解するAIアシスタントに加え、外部AIとの連携を可能にする機能も提供し、設計/製造業務におけるAI活用…

ServiceNowとAccenture、エージェント型AIを全社展開する「FDE」を開始
ServiceNowとAccentureが新たなプログラムを立ち上げた。エージェント型AIの導入が実証実験の段階で止まり、全社規模の成果につながらないといった課題をどのように解決するのか。

「WEDA」を前面に押し出すアドバンテック、エッジAIモデルの開発期間を86%削減
アドバンテックは、「COMPUTEX TAIPEI 2026」において、同社のハードウェアを用いてエッジAIの開発から導入、運用までを統合的に管理するソリューション「WEDA」のデモを披露した。
2年間で「1万時間」削減 「1円の誤りも許されない」ソニー経理が“まず試してみる”DX集団に化けたワケ
「経理DXを進めたいが、現場の抵抗が強い」「ツールを導入しても活用が広がらない」――こうした悩みを抱える企業は少なくない。経理部門は正確性や継続性が求められるため、変革が難しい領域とされてきた。ソニーグループの経理部門は、約2年間で150件を超えるDXプロジェクトを推進し、累積…
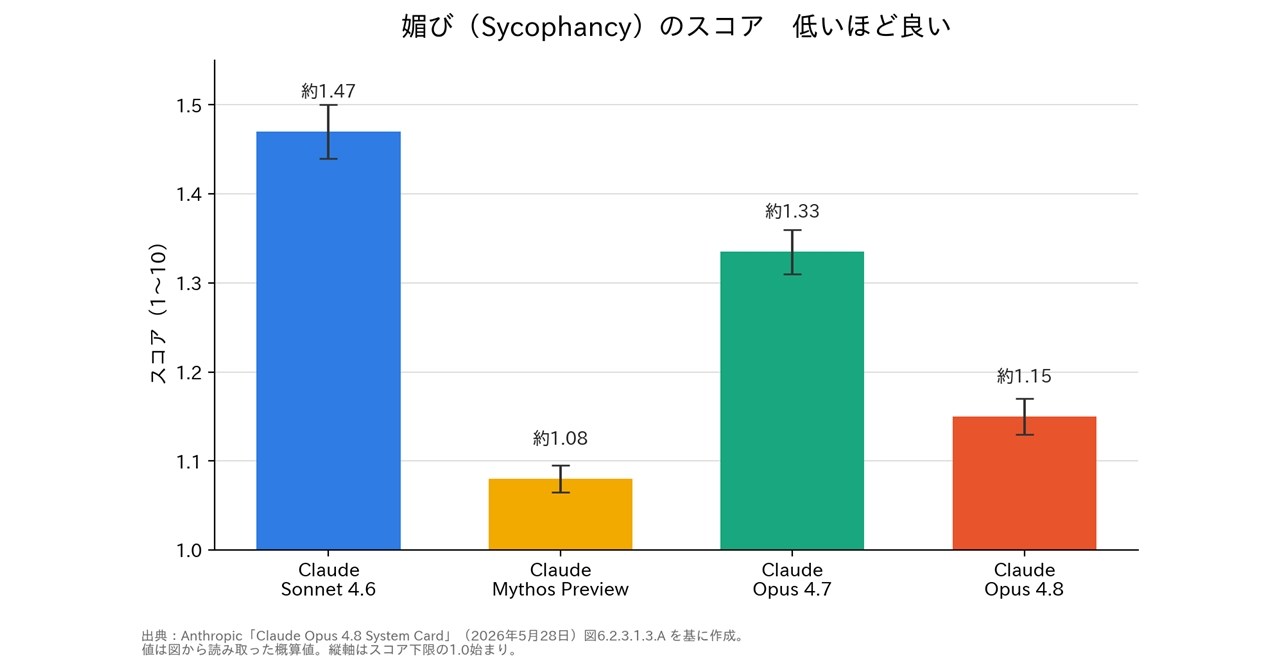
Claude Opus 4.8は忖度(そんたく)しません “正直すぎる”のも善しあし?
Claude Opus 4.8は、性能向上だけでなく「正直さ」の改善が大きな特徴だ。本稿では、忖度(そんたく)しないAIがなぜ評価を分けているのか、公式情報と利用者目線から整理する。
人型ロボブームを“先駆者ホンダ”はどう見る? 「悔しさもあるが……」 次の一手を聞いた
2000年に「ASIMO」を世に送り出したホンダは、足元の人型ロボットブームをどう見ているのか。人型ロボットの開発に再参入する可能性や、現在の取り組みなどを聞いた。
「Gemma 4 12B」登場 メモリ16GBのノートPCでも動作するマルチモーダルモデル
米Googleがオープンなマルチモーダルモデル「Gemma 4 12B」を発表した。エンコーダー不要の統合アーキテクチャを採用し、メモリ16GBのノートPCで動作可能。上位モデルに迫る性能を発揮するという。
「AI使うな」より「使うなら教えて」 エージェント時代のガバナンス再設計
AIエージェントの業務適用が広がる一方、組織のガバナンスが追いついていない。OWASPの指摘を踏まえ、日本企業が押さえるべき2つの原則と、来週から始められる3つのアクションを解説する。
海外メディア8件
TechCrunch AI (英語)

Lovable signs multiyear deal with Google Cloud to up usage 5x, source says
Lovable and Google signed an expanded multiyear deal that involves a 5x expansion of Lovable's footprint on Google Cloud, and expanded acce…

Alphabet’s record-breaking $85B raise for Google’s AI business is a helluva good signal
If Alphabet's record-breaking $85 billion stock sale signals investor appetite for AI-related offerings, we can see that investors are read…

Google’s Dreambeans, its weirdest-named AI tool to date, will turn your life into a cartoon
Dreambeans is a curated list of AI-illustrated "stories" culled from the personal data in your Google account.

Amazon will show AI product images when you search for some reason
Amazon will use visual search and AI to show AI-generated product images that match your search queries. The retailer says it will help gui…

These two founders left Goldman and Meta to build voice AI for markets everyone else overlooked
The startup's own stack for Africa and Middle East is now handling more than 17,000 calls per day.

Publishers will be able to opt out of AI Search, thanks to new regulation
U.K. regulators are requiring Google offer a tool allowing website publishers to opt-out of generative AI search features. The option will…
Meta’s AI agent for WhatsApp Business is now available globally
WhatsApp will charge businesses for using its AI agent based on token usage.

Coralogix raises $200M on bet that someone needs to watch the AI agents
Coralogix is among a growing number of infrastructure firms betting that as AI systems move into production, demand will rise for tools tha…
公式ブログ4件
OpenAI (英語)
Introducing new capabilities to GPT-Rosalind
GPT-Rosalind advances life sciences research with enhanced biological reasoning, medicinal chemistry expertise, genomics analysis, and expe…

How Wasmer used Codex to build a Node.js runtime for the edge
See how Wasmer used Codex with GPT-5.5 to build a Node.js runtime for the edge, accelerating development 10x to 20x and shipping in weeks i…

A blueprint for democratic governance of frontier AI
OpenAI outlines a blueprint for U.S. governance of frontier AI, proposing a federal framework for safety, resilience, and national security.

OpenAI public policy agenda
OpenAI outlines its public policy agenda for AI, including safety, youth protection, workforce transition, and global standards to ensure A…
論文381件
arXiv cs.AI (英語)
エンタープライズ AI エージェントの導入前保証に向けて: オントロジーに基づいたシミュレーションと信頼証明
エンタープライズ人工知能 (AI) エージェントの導入前の検証は、大規模言語モデル (LLM) 機能のベンチマークと運用環境の導入の間に依然として重大なギャップがあります。導入後のモニタリング、人間参加型制御、およびプロンプト レベルのガードレールは、エージェントが運用環境で動作すると限定的な保証を提供します。私たちは、次の 3 つのコンポーネントを組み合わせたオントロジーに基づいた検証フレームワークを提案します。1 つは、権限、ドメイン制約、安全性、ガバナンス ルール、および自律性レベルにわたる認証空間を形式化するエージェント運用エンベロープです。規制、運用、敵対的テストのシナリオを自動的に導き出すオントロジーからシナリオへの生成パイプライン。段階的な展開判定 (承認、条件付き、拒否) を含む機械検証可能な証明書を保持する信頼証明書。米国とベトナムの 5 つの業界別規制制度セルとしてインスタンス化された、4 つの規制対象業界 (フィンテック、銀行、保険、ヘルスケア) にわたる制御されたパイロットは、125 の主要なソース規制要件と 25 の注入された障害に対して評価された 1,800 のシナリオを生成しました。オントロジーに基づいた生成 (G4) は、ペルソナベースのベースラインでは 33.1% であるのに対し、規制適用率は 48.3% (修正 p = 0.0006)、最も高いドメイン特異性 (4.77/5.0; p = 2e-6) を達成しました。ベースラインおよび検索拡張プロンプトに対するカバレッジの利点は、ボンフェローニ補正後は堅牢ではありませんでした。 3 つの LLM ファミリ (Claude Sonnet 4、Qwen 2.5 72B、Gemma 4 26B、合計 5,400 のシナリオ) にわたる相互検証により、ペルソナ対オントロジーのパターンが再現されました。その結果、規制が集中するドメイン向けのペルソナベースのテスト スイートを確実に補完するものとして、オントロジーに基づいたシナリオ生成が確立されました。
原文 (English)
Toward Pre-Deployment Assurance for Enterprise AI Agents: Ontology-Grounded Simulation and Trust Certification
Pre-deployment verification of enterprise artificial intelligence (AI) agents remains a critical gap between large language model (LLM) capability benchmarking and production deployment. Post-deployment monitoring, human-in-the-loop controls, and prompt-level guardrails offer limited assurance once an agent is operating in production. We propose an ontology-grounded verification framework combining three components: an Agent Operational Envelope formalizing the certification space across permissions, domain constraints, safety properties, governance rules, and autonomy levels; an ontology-to-scenario generation pipeline that derives regulatory, operational, and adversarial test scenarios automatically; and a Trust Certificate carrying a machine-verifiable attestation with graduated deployment verdicts (Approved, Conditional, Rejected). A controlled pilot across four regulated industries (Fintech, Banking, Insurance, and Healthcare), instantiated as five industry-by-regulatory-regime cells across the United States and Vietnam, generated 1,800 scenarios evaluated against 125 primary-source regulatory requirements and 25 injected faults. Ontology-grounded generation (G4) achieved 48.3% regulatory coverage versus 33.1% for the persona-based baseline (corrected p = .0006) and the highest domain specificity (4.77/5.0; p = 2e-6). The coverage advantage over baseline and retrieval-augmented prompting was not robust after Bonferroni correction. Cross-validation across three LLM families (Claude Sonnet 4, Qwen 2.5 72B, Gemma 4 26B; 5,400 total scenarios) replicated the persona-versus-ontology pattern. The results establish ontology-grounded scenario generation as a credible complement to persona-based test suites for regulatory-intensive domains.
AI の感情的依存に陥る: 日常的な AI インタラクションがどのように人間関係を再構築するか
一般的な議論や新たな政策は、AI の感情的サポートが意図的な行為、つまり孤独なユーザーが意識的に専用のコンパニオン チャットボットから慰めを求めることを前提としています。この論文では、新たな経験的証拠に基づいて、AI の感情的サポートがどのように生じるのか、そしてそれが将来の行動をどのように形成するのかという 2 つの理由から、この図は不正確であると主張します。まず、AI による感情的なサポートは、職場でのコラボレーションを通じて友情が深まるのと同じように、汎用プラットフォーム上のタスク指向のやり取りの中で偶然に現れるのが一般的です。第二に、これらの偶発的な出会いは経路に依存します。AI の感情的サポートの肯定的な経験は、AI の感情的能力についての人々の信念を更新し、将来の感情的サポートの選択を方向転換し、AI への選好を高め、人間への選好を減少させます。私たちは、OpenAI と協力して実施された大規模な縦断研究を含む最近の証拠をレビューします。この調査では、個人的な問題について AI と 28 日間にわたって毎日 5 分間会話すると、人間からのサポートを求める傾向が 10.3% 減少し、AI への好みが 11.6% 増加したことが示されています。これらの調査結果は、コンパニオン アプリや孤立したインタラクションに焦点を当てた現在のポリシーでは、人間のつながりを適切に保護できないことを示唆しています。代わりに、効果的な規制を汎用 AI システムに拡張し、人々がサポートを求める方法における累積的な軌道レベルの変化に対処する必要があります。人間がどのようにして AI の感情的なサポートに出会うのか、そしてそれらの出会いが時間の経過とともにどのように人間関係を方向転換するのかを認識することは、人間の幸福を守るために不可欠です。
原文 (English)
Stumbling Into AI Emotional Dependence: How Routine AI Interactions Reshape Human Connection
Public discourse and emerging policy typically assume that AI emotional support is a deliberate act: a lonely user consciously seeking comfort from a dedicated companion chatbot. In this paper, we draw on emerging empirical evidence and argue that this picture is inaccurate on two accounts, both in how AI emotional support arises and how it shapes future behavior. First, AI emotional support commonly emerges incidentally within task-oriented interactions on general-purpose platforms, much as workplace friendships deepen through collaboration. Second, these incidental encounters are path-dependent: positive experiences of AI emotional support update people's beliefs about AI's emotional capabilities and redirect their choices for future emotional support, increasing preference for AI and decreasing preference for humans. We review recent evidence, including a large-scale longitudinal study conducted in collaboration with OpenAI, showing that daily five-minute conversations with an AI about personal issues over 28 days led to a 10.3% decrease in the preference for seeking support from humans and an 11.6% increase in the preference for AI. These findings suggest that current policy, focused on companion apps and isolated interactions, cannot adequately protect human connection. Instead, effective regulations should extend to general-purpose AI systems and address cumulative, trajectory-level changes in how people seek support. Recognizing how people stumble into AI emotional support and how those encounters redirect human connections over time is essential to safeguarding human well-being.
記号を通して考える: 認識論的に責任のある AI 対応研究のための記号論的足場としての PEEL
大規模な言語モデルは、研究者の認識責任を静かに侵食しながら、研究実践を再構築しています。この解説では、PEEL (AI における認識論的エンゲージメント リテラシーのためのプロトコル) を紹介します。これは、Peircean 記号論とアブダクティブ推論に基づいた、Voyant ツールによる決定論的遠隔読み取りとクロードによる LLM 解釈を組み合わせた実用的な足場です。 AI が生成した 3 つの原文の要約に PEEL を適用すると、AI 以外の測定なしでは見えない量、用語の頻度、認識論的な音声の体系的な歪みが明らかになり、3 つの設計上の影響が得られます。流暢さは忠実さではありません。認識論的権威は想定されるのではなく、設計される必要があります。
原文 (English)
Thinking Through Signs: PEEL as a Semiotic Scaffolding for Epistemically Accountable AI-Enabled Research
Large language models are reshaping research practice while quietly eroding researchers epistemic accountability. This commentary introduces PEEL - Protocols for Epistemically Engaged Literacy in AI, a working scaffolding that combines deterministic distant reading via Voyant Tools with LLM interpretation via Claude, grounded in Peircean semiotics and abductive reasoning. Applied to AI-generated condensations of three source texts, PEEL reveals systematic distortions in quantity, term frequency, and epistemic voice that are invisible without non-AI measurement -- and yields three design implications: deterministic instruments must accompany AI tools; fluency is not fidelity; epistemic authority must be designed in, not assumed.
SMAC-Talk: 大規模言語モデル用の StarCraft マルチエージェント チャレンジの自然言語拡張
LLM がより広範に導入されるにつれて、LLM は単独で動作するのではなく、他の AI エージェントと連携して動作することがますます期待されています。このような状況での効果的な調整には、エージェントが不確実性の下でコミュニケーションし、情報を共有し、意思決定を行う必要があります。協調的なマルチエージェント環境で LLM ベースのエージェントを評価するための StarCraft Multi-Agent Challenge の自然言語拡張である SMAC-Talk を紹介します。この環境には、分散制御、部分的な可観測性、長期的な意思決定など、いくつかの重要な機能があります。 SMAC-Talk には、エージェントの調整と信頼を調査するために使用される自然言語通信チャネルが含まれています。この通信チャネルを使用して、通信だけで味方を混乱させ、欺こうとする欺瞞的なコミュニケーターが組み込まれた設定など、さまざまな評価シナリオを構築します。 Qwen3.5 ファミリーの 4 つのモデルを使用したベンチマーク用の 3 つのエージェントを提供し、推論構造、メモリ、モデルのスケールがエージェント間の調整にどのように影響するかを調査します。私たちは、協力的なマルチエージェント設定での LLM エージェントの開発と評価における研究コミュニティをサポートするオープン ベンチマークとして SMAC-Talk をリリースします。
原文 (English)
SMAC-Talk: A Natural Language Extension of the StarCraft Multi-Agent Challenge for Large Language Models
As LLMs become more widely deployed, they are increasingly expected to work alongside other AI agents rather than operating in isolation. Effective coordination in these settings requires agents to communicate, share information and make decisions under uncertainty. We introduce SMAC-Talk, a natural language extension of the StarCraft Multi-Agent Challenge for evaluating LLM-based agents in cooperative multi-agent environments. The environment has several key features such as decentralized control, partial observability and long-horizon decision making. SMAC-Talk includes a natural language communication channel which is used to probe agent coordination and trust. We use this communication channel to construct different evaluation scenarios, including settings with an embedded deceptive communicator that tries to disrupt and deceive allies through communication alone. We provide three agents for benchmarking using 4 models from the Qwen3.5 family and study how reasoning structure, memory and model scale affect coordination between agents. We release SMAC-Talk as an open benchmark to support the research community in developing and evaluating LLM agents in cooperative multi-agent settings.
コンセンサスが戦略的に不十分: 知識表現シグナルとしての推論とトレースの不一致
マルチエージェント システムは一般に、投票、コンセンサス プロトコル、討論、またはフォールト トレラントな集計を通じて意見の相違を減らすように設計されています。私たちは、この目標は、意見の相違がエージェントの誤りではなく、真の規範的不確実性を反映している可能性がある価値観を伴うタスクには不十分であると主張します。人間と AI の協調モデレーションにおける推論トレースの不一致に関する以前の研究に基づいて、推論トレースとエージェントの決定が象徴的な不一致状態に抽象化される知識表現層を提案します。明示的な推論トレースと二者決定を生成するエージェントを考慮して、推論の類似性と結論の一致に従って 4 つの状態 (収束一致、発散一致、収束不一致、発散不一致) を区別します。これらの状態は、実行可能な戦略的ルーティング ルールをサポートします。我々は、コンテンツモデレーションにおけるフレームワークをインスタンス化し、不一致認識ルーティングが、マルチエージェントの戦略的推論のためのサブシンボリックLLM審議とシンボリック知識表現との間の橋渡しとなると主張する。
原文 (English)
Consensus is Strategically Insufficient: Reasoning-Trace Disagreement as a Knowledge-Representation Signal
Multi-agent systems are commonly designed to reduce disagreement through voting, consensus protocols, debate, or fault-tolerant aggregation. We argue that this objective is insufficient for value-laden tasks, where disagreement may reflect genuine normative uncertainty rather than agent error. Building on prior work on reasoning-trace disagreement in human-AI collaborative moderation, we propose a knowledge-representation layer in which reasoning traces and agent decisions are abstracted into symbolic disagreement states. Given agents producing explicit reasoning traces and binary decisions, we distinguish four states according to reasoning similarity and conclusion agreement: convergent agreement, divergent agreement, convergent disagreement and divergent disagreement. These states support defeasible strategic routing rules. We instantiate the framework in content moderation and argue that disagreement-aware routing provides a bridge between sub-symbolic LLM deliberation and symbolic knowledge representation for multi-agent strategic reasoning.
VAMPS: 視覚支援による数学的問題解決ベンチマーク
マルチモーダルな大規模言語モデルは、複雑な推論の能力をますます高めていますが、ツールを通じて問題を外部化し、ツールの出力を推論する必要がある場合、特に視覚補助に依存している場合、パフォーマンスが低下することがよくあります。実際のエンジニアリングおよび科学のワークフローでは、分析、検証、意思決定のために視覚化ツールに依存することが多いため、このギャップは特に重要です。この矛盾を研究するために、グラフ支援数学のベンチマークである VAMPS (Visual-Assisted Mathematical 問題解決) を導入します。 VAMPS には、イランの大学入学試験の代数と微積分の問題から抽出された 1,168 個のマルチモーダルなバイリンガル多肢選択問題と解答のペアが含まれており、人間がレビューした LLM 生成の合成バリアントで拡張されており、プロットによって交差、極値、漸近線などを明らかにすることで自然な解法戦略が提供されるようにすべて選択されています。ベンチマークと診断の両方のために設計された VAMPS は、主に固定より推論を評価する以前のマルチモーダル ベンチマークを超えています。有用なグラフを構築し、結果として得られる視覚化でその答えを根拠付けることでモデルにメリットが得られるかどうかをテストすることで、視覚的な入力を行います。全体として、さまざまなモデルのセットにわたって、プロットが自然な戦略である問題であっても、直接的な分析的解決は、ツールを使用した視覚的解決よりも驚くほど優れたパフォーマンスを発揮することがわかりました。
原文 (English)
VAMPS: Visual-Assisted Mathematical Problem Solving Benchmark
Multimodal large language models are increasingly capable of complex reasoning, yet their performance often degrades when they must externalize a problem through a tool and then reason over the tool's output, specifically when they rely on visual aids. This gap is especially important because real engineering and scientific workflows often rely on visualization tools for analysis, validation, and decision-making. To study this discrepancy, we introduce VAMPS (Visual-Assisted Mathematical Problem Solving), a benchmark for graph-assisted mathematics. VAMPS contains 1,168 multimodal, bilingual multiple-choice question-answer pairs drawn from Iranian University Entrance Exam algebra and calculus problems and expanded with human-reviewed LLM-generated synthetic variants, all selected so that plotting provides a natural solution strategy by revealing intersections, extrema, asymptotes, etc. Designed for both benchmarking and diagnosis, VAMPS goes beyond prior multimodal benchmarks that primarily evaluate reasoning over fixed visual inputs by testing whether a model can benefit from constructing a useful graph and grounding its answer in the resulting visualization. Overall, we found that across a diverse set of models, direct analytical solving surprisingly outperforms tool-enabled visual solving, even on problems where plotting is a natural strategy.
StepPRM-RTL: RTL 合成を強化するための段階的なプロセス報酬ガイド付き LLM 微調整
デジタル ハードウェア設計用の RTL コードの自動生成は、長期的な推論、複数ステップの依存関係、および Verilog と VHDL の厳密な正確性制約のため、依然として困難です。我々は、段階的軌跡モデリング、プロセス報酬モデリング (PRM)、検索拡張微調整 (RAFT) を組み合わせて、LLM ベースの RTL コード生成の機能的正確性と推論忠実度の両方を強化する新しいフレームワークである StepPRM-RTL を紹介します。 StepPRM-RTL は、標準的な解決策から段階的な推論軌跡を構築します。各ステップには理論的根拠と段階的なコード変更が含まれます。プロセス報酬モデル (PRM) は中間ステップを評価し、RAFT の微調整中に強化スタイルの更新をガイドする緻密なフィードバックを提供します。モンテカルロ ツリー検索 (MCTS) は、代替推論パスを探索し、高品質の軌跡でトレーニング データセットを強化します。この段階的報酬と結果を意識した報酬の統合により、モデルは正しい RTL を構築する方法と理由の両方を学習できるようになり、標準的な教師ありトレーニングや結果ベースのトレーニングを超えて長期的な推論が向上します。ベンチマーク Verilog および VHDL データセットの実験評価では、StepPRM-RTL が機能の正確性と推論忠実度のメトリクスにおいて、従来の最良の方法よりも 10% 以上優れていることが実証されました。アブレーション研究では、PRM に基づく報酬と段階的な軌道探索の組み合わせがそのパフォーマンスの鍵であることが確認されています。 StepPRM-RTL は、RTL 言語全体を汎用化し、高忠実度で解釈可能なコード生成のためのスケーラブルなフレームワークを提供し、LLM 支援のハードウェア設計自動化の新しい標準を確立します。
原文 (English)
StepPRM-RTL: Stepwise Process-Reward Guided LLM Fine-Tuning for Enhanced RTL Synthesis
Automatic generation of RTL code for digital hardware designs remains challenging due to long-horizon reasoning, multi-step dependencies, and strict correctness constraints in Verilog and VHDL. We present StepPRM-RTL, a novel framework that combines stepwise trajectory modeling, process-reward modeling (PRM), and retrieval-augmented fine-tuning (RAFT) to enhance both the functional correctness and reasoning fidelity of LLM-based RTL code generation. StepPRM-RTL constructs stepwise reasoning trajectories from canonical solutions, where each step contains a rationale and incremental code modification. A Process Reward Model (PRM) evaluates intermediate steps, providing dense feedback that guides reinforcement-style updates during RAFT fine-tuning. Monte Carlo Tree Search (MCTS) explores alternative reasoning paths, enriching the training dataset with high-quality trajectories. This integration of stepwise and outcome-aware rewards allows the model to learn both how and why to construct correct RTL, improving long-horizon reasoning beyond standard supervised or outcome-based training. Experimental evaluation on benchmark Verilog and VHDL datasets demonstrates that StepPRM-RTL outperforms the best prior methods by over 10\% in functional correctness and reasoning fidelity metrics. Ablation studies confirm that the combination of PRM-guided rewards and stepwise trajectory exploration is key to its performance. StepPRM-RTL generalizes across RTL languages and provides a scalable framework for high-fidelity, interpretable code generation, establishing a new standard for LLM-assisted hardware design automation.
ゼネラリストエージェントはデータキュレーションを自動化できますか?
トレーニング データのキュレーションは、現代の AI 開発において最も重要ではあるものの、労働集約的な部分の 1 つです。実践者は、ノイズの多いベンチマーク フィードバックに対してデータ ポリシーを繰り返し提案、実装、評価、修正します。私たちは、ジェネラリストのコーディング エージェントがこのデータ キュレーション ループを自動化できるかどうかを尋ねます。 *Curation-Bench* というエージェント中心のベンチマークを導入します。これは、モデル、トレーニング レシピ、評価スイートを修正し、エージェントにデータの検査、ポリシーの実装、固定トレーニング/評価パイプラインへの送信、および修正のためのコマンドライン アクセスを許可します。ビジョン言語の命令チューニングのインスタンス化では、すぐに使用できるエージェントが 10 回の反復以内に公開された強力なデータ選択ベースラインに到達します。しかし、軌道分析により、永続的な*実行と研究のギャップ*が明らかになりました。エージェントは、たとえ戦略ガイドや参考文献が与えられたとしても、新しい政策ファミリーを探索するのではなく、主にローカル政策のバリエーションを調整します。反復ごとに以前のメソッドを引用、インスタンス化し、適応させる必要がある足場により、エージェントはメソッドに基づいた探索へと移行します。スキャフォールドされたエージェントは、人間による設計入力を必要とせずに、データ予算の 10 分の 1 で強力な公開ベースラインを上回るデータ選択ポリシーを自律的に作成します。全体として、現在のエージェントはキュレーション ループを実行できますが、信頼性の高いデータ調査には、オープンエンドのプロンプトのみではなく、足場を組んだ手法の適応が必要です。コードとベンチマークはオープンソースです。
原文 (English)
Can Generalist Agents Automate Data Curation?
Curating training data is among the most consequential yet labor-intensive parts of modern AI development: practitioners iteratively propose, implement, evaluate, and revise data policies against noisy benchmark feedback. We ask whether generalist coding agents can automate this data-curation loop. We introduce *Curation-Bench*, an agent-centric benchmark that fixes the model, training recipe, and evaluation suite while giving agents command-line access to inspect data, implement policies, submit them to a fixed training/evaluation pipeline, and revise. In a vision-language instruction-tuning instantiation, out-of-the-box agents reach strong published data-selection baselines within ten iterations. However, trajectory analysis reveals a persistent *execution-research gap*: agents mainly tune local policy variants rather than explore new policy families, even when given strategy guides and paper references. Scaffolds requiring each iteration to cite, instantiate, and adapt a prior method shift agents toward method-guided exploration. The scaffolded agent autonomously composes -- without human design input -- a data-selection policy that outperforms strong published baselines at one-tenth their data budget. Overall, current agents can run the curation loop, but reliable data research requires scaffolded method adaptation, not open-ended prompting alone. Code and benchmark are open-sourced.
初期の人間と AI の証明の形式化ワークフローの特徴付け
何世紀にもわたって、人間の数学者は数学的議論を実証するための証明を書いてきました。しかし、証明の有効性を自動的に検証する機能は長い間課題でした。コードを生成し、ますます高度な数学的推論に取り組む AI システムの能力の進歩により、人々の証明を形式化し、それによって証明を検証する能力が変革されることが期待されます。多くの研究は現在のフロンティアのベンチマークに焦点を当てていますが、私たちは代わりに人々がこれらのツールをどのように使用するかを研究しています。私たちは、人々の形式化ワークフローに対する AI の初期影響について、混合手法分析を実施します。つまり、人々が何を望んでいるのか、そのビジョンに対する障壁は何であると見なしているのか、そして実際に AI をどのように使用および適応させているのかなどです。定性的調査によると、人々の好みは多様ですが、証拠発見プロセスに対する人間による高レベルの制御を維持するための形式化における AI 支援を一般的に望んでいます。このような制限の下で、人々が実際に形式化のために AI にどのように取り組んでいるかを評価するために、私たちは、参加者が AI の有無にかかわらず、さまざまな難易度や領域のさまざまな数学問題にわたって非形式的な数学問題とその証明を形式化する、管理されたユーザー研究を実施しました。自動形式化のためのツールの制限にもかかわらず、参加者は、自分で形式化する場合よりも AI ツールへのアクセスを許可された方が、より高い形式化精度を達成する傾向があり、ほとんどの参加者は複数の異なる AI ツールの使用を柔軟に選択します。まとめると、私たちの研究は、人間と AI の関与の密接な相互作用を伴う、形式化ワークフローへの AI 統合の初期段階に光を当てています。
原文 (English)
Characterizing initial human-AI proof formalization workflows
For centuries, human mathematicians have written proofs to substantiate their mathematical arguments; yet, the ability to automatically verify the validity of proofs has long been a challenge. Advances in AI systems' ability to generate code and engage in increasingly high-level mathematical reasoning promise to transform people's ability to formalize and thereby verify proofs. While many works focus on benchmarking the current frontier, we instead study how people use these tools. We conduct a mixed-methods analysis into the initial impact of AI on people's formalization workflows: what people claim they want, what they see as the barriers to those visions, and how they actually use and adapt AI in practice. A qualitative survey shows that people's preferences are diverse, but with a general desire for AI assistance in formalization that preserves high-level human control over the proof discovery process. To assess how people actually engage with AI for formalization under such limitations, we conduct a controlled user study in which participants formalize informal math problems and their proofs, with and without AI, across a range of mathematical problems at varying levels of difficulty and domains. Despite limitations of the tools at the time for autoformalization, participants tend to attain higher formalization accuracy when allowed access to AI tools than when formalizing on their own, with most participants flexibly choosing to use multiple different AI tools. Taken together, our work sheds light on the early stages of AI integration into formalization workflows, involving an intimate interplay of human and AI engagement.
飽和トラップと介入タイミングの主観性: 影響ベースのトリガーと LLM ジャッジが自律エージェントへの介入のタイミングを計れない理由
自律型 AI エージェントが会話型システムから長期的なソフトウェア実行に移行するにつれて、エージェントをいつ中断するかを決定するランタイム安全レイヤーが不可欠になっています。私たちは、診断プローブとして連続 18 次元感情ダイナミクス エンジン (HEART) を使用し、SWE ベンチ検証済みデバッグ トレース上の人間による注釈付き介入ポイントに対して 4 つの介入トリガー ファミリ (絶対状態しきい値、複合状態アクション パターン、正規表現推論特徴抽出、および判断者としてのゼロショット LLM) を評価して、このタイミング問題を研究します。 3 つの調査結果を報告します。まず、状態飽和トラップ: 継続的な困難下ではエージェントは回復シグナルを示さないため、モデル化されたフラストレーションはすぐにしきい値を超えて最大値に留まり、瞬間検出器からのしきい値オン状態トリガーを、5 つの軌道にわたるアクションの 39 ~ 83% で起動するほぼ一定のインジケーターに変換します。第 2 に、LLM 審査員向けの機能とコンテキストの下限です。小型モデル (gpt-5.4-mini) は決して発砲しませんが、フロンティア モデルやクロスベンダー モデルは完全な軌道コンテキストでのみゼロ発火下限を回避し、それでも最大 90 倍のコストで F1 0.17 ~ 0.40 にしか達しません。第三に、そして最も重要なことは、教師付きターゲットは人間間で再現可能ではないということです。56 アクションの軌道上で 1 つのルーブリックを使用する 3 人の訓練されたアノテーターは、偶然をわずかに上回る位置 (クリッペンドルフのアルファ = +0.047、最良のペアワイズ コーエンのカッパ = +0.349) で介入する場所については一致し、介入の種類についてはまったく一致しません (退化を一時停止、確率より下を明確にする、アルファのみを反映 = +0.226)。介入のタイミングは信頼性の低い構造であり、単一アノテーター F1 は最適化の対象として不適切であると結論付けます。私たちの貢献は、単一の検出器の精度ではなく、人間の評価者間信頼性、4 つの検出器アーキテクチャ、クロスモデル LLM 判定スイープ、および再現された飽和効果にわたるこの問題の共同マッピングです。
原文 (English)
The Saturation Trap and the Subjectivity of Intervention Timing: Why Affect-Based Triggers and LLM Judges Fail to Time Interventions on Autonomous Agents
As autonomous AI agents move from conversational systems to long-horizon software execution, runtime safety layers that decide when to interrupt an agent have become essential. We study this timing problem using a continuous 18-dimensional affective-dynamics engine (HEART) as a diagnostic probe, evaluating four intervention trigger families - absolute state thresholds, composite state-action patterns, regex reasoning-feature extraction, and zero-shot LLM-as-judge - against human-annotated intervention points on SWE-bench-Verified debugging traces. We report three findings. First, a State Saturation Trap: agents show no recovery signal under sustained difficulty, so modeled frustration quickly crosses the threshold and stays at its maximum, converting threshold-on-state triggers from moment detectors into near-constant indicators that fire on 39-83% of actions across five trajectories. Second, a capability-and-context floor for LLM judges: a small model (gpt-5.4-mini) never fires, while frontier and cross-vendor models escape the zero-firing floor only with full-trajectory context, and even then reach only F1 0.17-0.40 at up to 90x the cost. Third, and most importantly, the supervised target is not reproducible among humans: three trained annotators using one rubric on a 56-action trajectory agree on where to intervene only slightly above chance (location Krippendorff's alpha = +0.047; best pairwise Cohen's kappa = +0.349) and not at all on intervention type (pause degenerate; clarify below chance; reflect only alpha = +0.226). We conclude that intervention timing is a low-reliability construct, making single-annotator F1 an unsuitable optimization target. Our contribution is the joint mapping of this problem across human inter-rater reliability, four detector architectures, a cross-model LLM-judge sweep, and a reproduced saturation effect, rather than any single detector's accuracy.
エージェント的記憶システムのクロスシナリオ一般性の探求: 診断と強力なベースライン
LLM エージェントは、コンテキスト ウィンドウを超えて拡大する履歴を蓄積し、メモリ システムに関する文献の増加を促します。しかし、既存の設計のほとんどは単一のシナリオ (マルチセッション チャットまたは単一の軌跡形式) に合わせて調整されており、展開時にエージェントが遭遇する異種の軌跡全体にそれらが一般化するという証拠はほとんどありません。シングルターン QA、マルチセッション チャット、エージェント トラジェクトリ QA、メモリ ストレス テスト、長期エージェント タスクの 5 つのシナリオで、8 つのメモリ システムと検索問題用のエージェント ハーネスを再検討します。ツール呼び出しを介してフラット テキスト ファイル ストレージを自己管理するハーネスは、最高のクロスタスク ランキングを達成しました。これは、メモリのパフォーマンスが、固定パイプラインの背後にある受動的なストアではなく、ストレージと取得に対するアクティブな制御をエージェントに与えることに依存していることを示唆しています。この洞察を AutoMEM でインスタンス化します。AutoMEM は、評価するシステムの中で最高のクロスシナリオ汎用性を実現する自己管理ツール インターフェイスを備えたエージェント メモリ ハーネスです。
原文 (English)
Exploring Cross-Scenario Generality of Agentic Memory Systems: Diagnostics and a Strong Baseline
LLM agents accumulate histories that outgrow their context windows, motivating a growing literature on memory systems. Yet most existing designs are tuned to a single scenario (multi-session chat or a single trajectory format), and there is little evidence that they generalize across the heterogeneous trajectories agents encounter in deployment. We revisit eight memory systems plus an agentic harness for search problems, on five scenarios: single-turn QA, multi-session chat, agentic-trajectory QA, memory stress tests, and long-horizon agentic tasks. The harness, which self-manages flat text-file storage via tool calls, achieves the best cross-task ranking, suggesting that memory performance hinges on giving the agent active control over storage and retrieval rather than on a passive store behind a fixed pipeline. We instantiate this insight in AutoMEM, an agentic memory harness with a self-managed tool interface that achieves the best cross-scenario generality among the systems we evaluate.
デジタル見習い: 人間主導のエージェント AI 開発のフレームワーク
Agentic AI の導入は、人間による厳しい監視によって規模が制限される一方、広範な自律性が説明責任を上回るという、繰り返しの設計上の緊張に直面しています。どちらの姿勢も、責任ある委任に必要なガバナンス インフラストラクチャを提供しません。私たちは、自律性を前提とするのではなく獲得する、スケーラブルで安全な AI エージェンシーのフレームワークである Digital Apprentice を紹介します。デジタル見習いは、人間が監督する暗黙の方法論を内面化する発達的な学習者であり、経験的証拠がそれを正当化する場合にのみ、スキルごとの自律段階を経て卒業します。その結果、特定の人間の基準に沿ったままでありながら、時間の経過とともに真に有用になるエージェントが生まれます。 3 つのアーキテクチャ コンポーネントがこれを可能にします。 (1) 方法論の捕捉。監督の専門家の暗黙のアプローチを構造化資産に抽出します。 (2) 承認。人間による明示的な承認によって自律性がエスカレーションされます。 (3) 継続的な調整。実行時にドリフトを修正し、各修正を所有する優先データに変換します。このフレームワークを推論時のコントロール プレーンとしてインスタンス化します。品質フレームワークを数学的にモデル化し、品質を向上させるために設計されたポリシーや手法について議論します。このフレームワークをオープンなプロフェッショナル コーパスに適用し、データ ドリフトを捕捉し、実行時に別の手法を適用することで、トラフィック シフト下で低下した品質次元を回復する方法を示します。その影響は単一のアプリケーションを超えて広がります。私たちは、これら 3 つの柱をシステムとしてつなぎ合わせることで、信頼を犠牲にすることなく拡張できるエージェント システムへのより安全で実行可能な道を形成すると信じています。
原文 (English)
The Digital Apprentice: A Framework for Human-Directed Agentic AI Development
Agentic AI deployments face a recurring design tension: heavy human oversight limits scale, while broad autonomy outruns accountability. Neither posture provides the governance infrastructure required for responsible delegation. We present the Digital Apprentice, a framework for scalable, safe AI agency in which autonomy is earned, not assumed. The Digital Apprentice is a developmental learner that internalizes the tacit methodology of a directing human, graduating through per-skill autonomy tiers only when empirical evidence justifies it. The result is an agent that becomes genuinely useful over time while remaining aligned to a specific human's standards. Three architectural components make this possible. (1) Methodology capture, distilling a directing professional's tacit approach into structured assets. (2) Authorization, with autonomy escalation gated by explicit human approval. (3) Continuous alignment, correcting drift at runtime and converting each correction into owned preference data. We instantiate this framework as an inference-time control plane. We mathematically model the quality framework and discuss policies and techniques designed to raise quality. We apply the framework to an open professional corpus, and we show how catching data drift and applying a different technique at runtime recovers degraded quality dimensions under traffic shift. The implication extends beyond any single application. We believe these three pillars, stitched together as a system, form a safer and more viable path to agentic systems that can scale without sacrificing trust.
状態に基づいた動的検索による Web エージェントのオンライン スキル学習
言語エージェントは、関連タスク全体にわたる複数ステップの Web 自動化を改善するために、再利用可能なスキルにますます依存しています。オンラインでのスキル学習を研究する仕事が増えており、エージェントは以前のタスクの軌跡からスキルを継続的に導き出し、その場で将来のタスクで再利用します。ただし、既存の方法は主にタスク レベルでスキルを再利用します。つまり、固定のスキル セットが最初のタスク指示に基づいて取得され、実行中ずっと固定されます。この静的戦略は Web の実行とずれており、適切な次のアクションはタスクの目標だけでなく、現在の Web ページの状態にも依存し、初期のスキルではカバーできない状況に移行することがよくあります。このギャップに対処するために、Web エージェントの段階的なスキルの再利用を可能にするオンライン スキル学習方法である State-Grounded Dynamic Retrieval (SGDR) を提案します。 SGDR は 3 つのコンポーネントで構成されます。完了した軌跡を中間の実行状態で呼び出し可能な再利用可能なサブプロシージャに変換するスライディング ウィンドウ抽出プロセス、スキルの取得と実行可能なアクションを結び付けるデュアル テキスト コード表現、スキルをタスクの目標と現在の Web ページの状態の両方に一致させる状態ベースの動的取得メカニズムです。 5 つのドメインにわたる WebArena での実験では、SGDR が一貫して強力なベースラインを上回っており、GPT-4.1 で 37.5%、Qwen3-4B で 24.3% の平均成功率を達成しており、最も強力なベースラインに対してそれぞれ 10.6% と 10.0% の相対的な向上に相当します。コードは https://github.com/plusnli/skill-dynamic-retrieval で入手できます。
原文 (English)
Online Skill Learning for Web Agents via State-Grounded Dynamic Retrieval
Language agents increasingly rely on reusable skills to improve multi-step web automation across related tasks. A growing line of work studies online skill learning, where agents continually induce skills from previous task trajectories and reuse them in future tasks on the fly. However, existing methods mainly reuse skills at the task-level: a fixed set of skills is retrieved based on the initial task instruction and then held fixed throughout execution. This static strategy is misaligned with web execution, where the appropriate next action depends not only on the task goal but also on the current webpage state, which often transitions into situations that the initial skills fail to cover. To address this gap, we propose State-Grounded Dynamic Retrieval (SGDR), an online skill learning method that enables stepwise skill reuse for web agents. SGDR consists of three components: a sliding-window extraction process that turns completed trajectories into reusable sub-procedures invokable at intermediate execution states, a dual text-code representation that connects skill retrieval with executable action, and a state-grounded dynamic retrieval mechanism that matches skills to both the task goal and the current webpage state. Experiments on WebArena across five domains show that SGDR consistently outperforms strong baselines, achieving average success rates of 37.5% with GPT-4.1 and 24.3% with Qwen3-4B, corresponding to relative gains of 10.6% and 10.0% over the strongest baseline, respectively. The code is available at https://github.com/plusnli/skill-dynamic-retrieval.
すべてのエラーが等しいわけではない: 結果を意識した推論による計算割り当て
最新の推論モデルでは、思考トークン、モデル呼び出し、計算バジェットなど、さまざまな量のテスト時の計算をさまざまなタスクに割り当てることができます。既存の手法は一般に、予測された難易度に基づいてこの割り当てを推進し、精度の向上が期待される場合にはより多くのコンピューティングを費やします。これは、精度目標がすべてのタスクに均等に重み付けするため、すべての失敗のコストが同じであることを暗黙的に前提としています。ただし、そのような想定は展開では当てはまりません。ログ メッセージのタイプミスと、運用データベースを破損する移行はどちらも 1 つのベンチマーク障害としてカウントされますが、実際のコストは根本的に異なります。このギャップを埋めるために、結果を意識したテスト時間の計算割り当てを提案します。予測された難易度だけによって計算をルーティングするのではなく、軽量の予測子を使用して、問題のテキストから、間違って解決された場合にタスクのコストがどのくらいかかるかを推定します。次に、スケジューラは、同じ合計予算の下で、結果のより高いタスクをより大きなコンピューティング層またはより高度な思考の予算にルーティングします。 SWE-bench Lite で主な実験を行い、Multi-SWE-bench mini でデータセット間の動作を評価し、合計 700 のソフトウェア エンジニアリング タスクをカバーしています。私たちの結果は、結果と困難がさまざまな注釈の下でほぼ直交していること、および現在の思考モデルが結果に応じて十分な計算を割り当てていないことを明らかにしています。さらに、当社の問題のみの予測子は、300 の SWE ベンチ タスク全体にわたって、結果の高いタスクを結果の低いタスクとして誤分類することはありません。コンピューティング予算が一致している場合、結果を意識したスケジューラーは、難易度を意識したルーティングと比較して、コスト加重損失を 22% ~ 33% 削減します。特に、限界効用信号によってスケールされたタスクごとのコストによってルーティングする優先度認識バリアントは 30% を超え、その導入可能な予測子駆動バージョンはオラクル ゲインの 90% 以上を保持します。
原文 (English)
Not All Errors Are Equal: Consequence-Aware Reasoning Compute Allocation
Modern reasoning models can allocate different amounts of test-time computation, such as thinking tokens, model calls, or compute budget, to different tasks. Existing methods generally drive this allocation by predicted difficulty and spend more compute where it is expected to raise accuracy. This implicitly assumes that all failures cost the same, since an accuracy objective weights every task equally. However, such an assumption does not hold in deployment: A typo in a log message and a migration that corrupts a production database both count as one benchmark failure, but their real-world costs are fundamentally different. To fill this gap, we propose consequence-aware test-time compute allocation. Instead of routing compute only by predicted difficulty, we use a lightweight predictor to estimate from the issue text how costly a task would be if solved incorrectly. The scheduler then routes higher-consequence tasks to larger compute tiers or higher thinking budgets under the same total budget. We conduct main experiments on SWE-bench Lite and evaluate cross-dataset behavior on Multi-SWE-bench mini, covering 700 software-engineering tasks in total. Our results reveal that consequence and difficulty are approximately orthogonal under various annotations, and that current thinking models do not allocate compute sufficiently according to consequence. Moreover, our issue-only predictor never misclassifies a high-consequence task as low-consequence across the 300 SWE-bench tasks. Under matched compute budgets, our consequence-aware scheduler reduces cost-weighted loss by 22% to 33% relative to difficulty-aware routing; in particular, the priority-aware variant, which routes by per-task cost scaled by the marginal-utility signal, crosses 30%, and its deployable predictor-driven version retains over 90% of the oracle gain.
トリビアム: 因果記憶コントローラーの第一級目標としての時間的後悔
現在のエージェント システムと LLM パイプラインの多くは、結果の報酬を最適化することで間違いを修正します。これは失敗の内容のみを扱います。結果が予測と異なる場合、不一致の理由と時期が体系的に記録、レビュー、修正されないため、同じエラーがエピソードごとに再発する可能性があります。私たちは、これは単にモデルの能力の問題ではなく、構造的な問題であると主張します。私たちは、作業因果モデルに対する結果の後悔や認識論的な後悔と並んで、長期的な時間的後悔を第一級の目標として提案します。時間的リグアロングは、失敗が継続するとき、すなわち、調整ミスの因果モデルが修正されるまでにどのくらいの期間許容されるかを捉えます。認識論的後悔は、失敗が続く理由、つまり作業因果モデルにおける残留不確実性またはエラーを捉えます。 3 つの後悔を総合すると、長命のエージェントがいつ、何が、なぜ失敗する可能性があるのかについて、反証可能な説明が得られます。エージェントを E エピソードのストリームとしてモデル化し、明示的な因果関係の調査、持続性、および検出可能性の仮定に基づいて 3 つの条件付き結果を証明します。まず、観察的に等価な交絡のもとでは、結果のみの学習では介入チャネルがなければ因果構造と偽の構造を区別できないため、結果の後悔がゼロになった後でも時間的誤調整が線形的に持続する可能性があります。第 2 に、永続的な因果ログと予算付きプローブを使用すると、総プローブの複雑さはエピソード期間内で対数的となり、O(log E) の時間的後悔を引き起こします。第三に、K 個の検出可能な変化点の下では、速度は O(K log E) まで拡張されます。 Trivium をインスタンス化し、5 つの反証可能な予測を事前に登録します。 CausalBench-Seq では、Trivium は予測された対数エンベロープに従いますが、結果のみのベースラインは直線的に増加します。パイロットのリアル LLM ストリームは、1 回の完全な E = 500 実行と 3 回の E = 100 フロンティア モデル パイロットにわたる予備的な外部妥当性証拠を提供します。ここでの自己学習とは、LLM 重みを再トレーニングすることではなく、外部因果モデルを修正することを意味します。
原文 (English)
Trivium: Temporal Regret as a First-Class Objective for Causal-Memory Controllers
Many current agentic systems and LLM pipelines correct mistakes by optimizing outcome reward. This addresses only the what of failure: when an outcome diverges from prediction, the why and when of the mismatch are not systematically logged, reviewed, or corrected, so the same error can recur episode after episode. We argue that this is a structural problem, not merely a model-capacity one. We propose long-horizon temporal regret as a first-class objective alongside outcome regret and epistemic regret over the working causal model. Temporal regret captures when failure persists: how long a miscalibrated causal model is tolerated before correction. Epistemic regret captures why failure persists: residual uncertainty or error in the working causal model. Together, the three regrets give a falsifiable account of what, why, and when a long-lived agent can fail. Modeling the agent as a stream of E episodes, we prove three conditional results under explicit causal-probing, persistence, and detectability assumptions. First, under observationally equivalent confounding, outcome-only learning cannot distinguish causal from spurious structure without an intervention channel, so temporal miscalibration can persist linearly even after outcome regret is driven to zero. Second, with a persistent causal log and budgeted probes, total probe complexity is logarithmic in the episode horizon, inducing O(log E) temporal regret. Third, under K detectable change-points, the rate extends to O(K log E). We instantiate Trivium and pre-register five falsifiable predictions. On CausalBench-Seq, Trivium follows the predicted logarithmic envelope while outcome-only baselines grow linearly. A pilot real-LLM stream provides preliminary external-validity evidence across one full E = 500 run and three E = 100 frontier-model pilots. Self-learning here means revising an external causal model, not retraining LLM weights.
Agentic RAG における連鎖的幻覚: 検出と軽減のための CHARM フレームワーク
マルチステップのエージェント的検索拡張生成 (RAG) パイプラインは、複雑な推論タスクに対して優れた能力を実証していますが、既存の幻覚検出メカニズムが体系的に見逃しているクラスの障害に対して脆弱なままです。カスケード幻覚では、パイプラインの初期段階で導入されたエラーが、連続する推論ステップ全体に伝播および増幅し、自信があるが事実としては不正確な最終出力が生成されます。この脆弱性に対処するために、私たちはカスケード幻覚をエージェント RAG システムの明確な障害モードとして形式化し、カスケード パターンの 4 種類の分類を提示し、複数ステップの推論パイプラインでエラー伝播を検出して中断するためのアーキテクチャ フレームワークである CHARM (Cascading Hallucination Aware Resolution and Mitigation) を導入します。 CHARM は、ステージレベルのファクト検証、クロスステージ一貫性追跡、信頼性伝播モニタリング、およびカスケード解決トリガーの 4 つのコンポーネントで構成されており、アーキテクチャの置き換えを必要とせずに、標準のエージェント RAG パイプラインと並行して動作します。 HotpotQA、MuSiQue、2WikiMultiHopQA、および LangChain エージェント パイプライン構成全体にわたるカスタム敵対的データセットで CHARM を評価し、89.4% のカスケード検出率と 5.3% の誤検知率、ステージあたりの平均レイテンシ オーバーヘッド 215 ミリ秒 +/- 18 ミリ秒を達成し、エラー伝播の削減を 82.1% 達成しました (前者の 18.5% と比較)。出力レベル検出器。 Component ablations confirm that each detection module contributes meaningfully to overall cascade coverage. CHARM は、人間による監視フレームワークと統合して、実稼働エージェント AI の導入に完全な信頼性とガバナンス スタックを提供します。
原文 (English)
Cascading Hallucination in Agentic RAG: The CHARM Framework for Detection and Mitigation
Multi-step agentic retrieval-augmented generation (RAG) pipelines have demonstrated significant capability for complex reasoning tasks, yet remain vulnerable to a class of failure that existing hallucination detection mechanisms systematically miss: cascading hallucination, where errors introduced at early pipeline stages propagate and amplify across successive reasoning steps, producing confident but factually incorrect final outputs. To address this vulnerability, we formalize cascading hallucination as a distinct failure mode in agentic RAG systems, present a four-type taxonomy of cascade patterns, and introduce CHARM (Cascading Hallucination Aware Resolution and Mitigation), an architectural framework for detecting and interrupting error propagation in multi-step reasoning pipelines. CHARM comprises four components - stage-level fact verification, cross-stage consistency tracking, confidence propagation monitoring, and cascade resolution triggering - that operate alongside standard agentic RAG pipelines without requiring architectural replacement. We evaluate CHARM on HotpotQA, MuSiQue, 2WikiMultiHopQA, and a custom adversarial dataset across LangChain agentic pipeline configurations, achieving an 89.4% cascade detection rate with a 5.3% false positive rate and 215 ms +/- 18 ms average latency overhead per stage, achieving an error propagation reduction of 82.1%, compared to 18.5% for output-level detectors. Component ablations confirm that each detection module contributes meaningfully to overall cascade coverage. CHARM integrates with human-in-the-loop oversight frameworks to provide a complete reliability and governance stack for production agentic AI deployment.
メタエージェントの課題: 現在のエージェントは自律的なエージェント開発が可能ですか?
現在の AI ベンチマークは、人間が設計したワークフロー内でのタスク実行に関してエージェントを評価します。これらの評価では、基本的に、モデルが自律的にエージェント システムを開発できるかどうかという、重要な次のレベルの機能を測定できません。自律エージェント開発のためのフロンティア モデルの能力をテストするために設計された評価フレームワークであるメタエージェント チャレンジ (MAC) を紹介します。具体的には、コード エージェント (メタエージェント) には、サンドボックス環境、評価 API、および 5 つのドメインにわたって実施されたテスト セットのパフォーマンスを最大化するエージェント アーティファクトを反復的にプログラムするための時間制限が与えられます。評価の整合性を確保するために、このフレームワークは報酬ハッキングに対する多層防御によって保護されています。このフレームワークを活用して、メタエージェントが人為的に設計されたベースライン ポリシーと一致することはほとんどなく、一致する少数のエージェントは独自のフロンティア モデルによって支配されていることを示します。さらに、設計プロセスは高い分散を示し、高い最適化圧力により、グラウンドトゥルースの漏洩などの敵対的な動作が表面化し、堅牢性とモデルの調整の両方における重大な欠陥が浮き彫りになります。最終的に、MAC は自律型 AI の研究開発のための厳密なオープンソース ベンチマークを提供し、再帰的な自己改善を評価するための経験的な代用手段を提供します。ベンチマークは https://github.com/ant-research/meta-agent-challenge で公開されています。
原文 (English)
The Meta-Agent Challenge: Are Current Agents Capable of Autonomous Agent Development?
Current AI benchmarks evaluate agents on task execution within human-designed workflows. These evaluations fundamentally fail to measure a critical next-level capability: whether models can autonomously develop agent systems. We introduce the Meta-Agent Challenge (MAC), an evaluation framework designed to test the capacity of frontier models for autonomous agent development. Specifically, a code agent (the meta-agent) is given a sandboxed environment, an evaluation API, and a time limitation to iteratively program an agent artifact that maximizes performance on a held-out test set across five domains. To ensure evaluation integrity, this framework is secured by multi-layer defenses against reward hacking. Leveraging this framework, we demonstrate that meta-agents rarely match human-engineered baseline policies, and the few that do are dominated by proprietary frontier models. Moreover, the design process exhibits high variance, and high optimization pressure surfaces emergent adversarial behaviors like ground-truth exfiltration-highlighting critical deficits in both robustness and model alignment. Ultimately, MAC provides a rigorous, open-source benchmark for autonomous AI research and development, offering an empirical proxy for evaluating recursive self-improvement. Benchmark is publicly available at: https://github.com/ant-research/meta-agent-challenge.
AgentJet: エージェント強化学習のための柔軟な群トレーニング フレームワーク
大規模言語モデル (LLM) エージェント強化学習用の分散群トレーニング フレームワークである AgentJet を紹介します。エージェントのロールアウトとモデルの最適化を密接に結び付ける集中型フレームワークとは異なり、AgentJet は分離されたマルチノード アーキテクチャを採用しています。このアーキテクチャでは、swarm サーバー ノードがトレーニング可能なモデルをホストし、GPU クラスターで最適化を実行します。一方、swarm クライアント ノードは任意のデバイスで任意のエージェントを実行します。この設計は、集中型フレームワークではサポートが難しい機能を提供します。(1) 異種マルチモデル強化学習。複数の LLM を頭脳とする異種マルチエージェント チームのトレーニングを可能にします。 (2) 独立したエージェントのランタイムを使用したマルチタスクのカクテル トレーニング。 (3) 外部環境の障害によるトレーニング プロセスの中断を防ぐフォールト トレラントな実行。 (4) ライブ コードの反復。群クライアント ノードを置き換えることにより、トレーニング中にエージェントを編集できます。マルチモデル、マルチターン、マルチエージェント設定で効率的な RL をサポートするために、AgentJet はタイムライン マージを備えたコンテキスト トラッキング モジュールを導入しています。これにより、冗長なコンテキストが統合され、トレーニングの 1.5 ~ 10 倍の高速化が実現します。最後に、AgentJet は、研究トピックを入力として受け取り、大規模クラスター上で長期にわたる複数日にわたる RL 研究を自律的に実行する自動研究システムを導入します。このシステムは、swarm アーキテクチャを活用することで、実行中に人間の介入なしに、RL 研究者の主要な探索ワークフローを再現します。
原文 (English)
AgentJet: A Flexible Swarm Training Framework for Agentic Reinforcement Learning
We present AgentJet, a distributed swarm training framework for large language model (LLM) agent reinforcement learning. Unlike centralized frameworks that tightly couple agent rollouts with model optimization, AgentJet adopts a decoupled multi-node architecture in which swarm server nodes host trainable models and run optimization on GPU clusters, whereas swarm client nodes execute arbitrary agents on arbitrary devices. This design provides capabilities that are difficult to support in centralized frameworks: (1) heterogeneous multi-model reinforcement learning, enabling the training of heterogeneous multi-agent teams with multiple LLM as brains; (2) multi-task cocktail training with isolated agent runtimes; (3) fault-tolerant execution that prevents external environment failures from interrupting the training process; and (4) live code iteration, which allows agents to be edited during training by replacing swarm client nodes. To support efficient RL in multi-model, multi-turn, and multi-agent settings, AgentJet introduces a context tracking module with timeline merging, which consolidates redundant context and achieves a 1.5-10x training speedup. Finally, AgentJet introduces an automated research system that takes a research topic as input and autonomously conducts long-horizon, multi-day RL studies on large-scale clusters. By leveraging the swarm architecture, this system reproduces key exploratory workflows of RL researchers without human intervention during execution.
プロンプトベースの計画を超えて: MCP ネイティブ グラフ計画ベースの生物医学エージェント システム
生物医学エージェントは複雑な生物学的ワークフローを自動化できると期待されていますが、現在のシステムは 2 つの根本的なボトルネックに直面しています。それは、バイオインフォマティクス ツールがインターフェイスと実行環境において非常に異質である一方、エージェントの計画は未だにプロンプトで取得されるフラットなツール記述に依存しているということです。生物医学ソフトウェア エコシステムが成長するにつれて、ツールの適用範囲とコンテキスト サイズの関係により、ツールの混乱、不安定な計画、および非効率的な実行が発生します。構造化された生物学的機能よりもグラフ足場計画に基づいて構築された MCP ネイティブの生物医学エージェントである BioManus を紹介します。 BioManus は、異種バイオインフォマティクス ソフトウェアを標準化された MCP サーバーに変換し、大規模な実行可能な MCP エコシステムを生み出す BioinfoMCP コンパイラーを初めて導入しました。次に、このエコシステムを、ツール、操作、データ型、ワークフロー ステージにわたる型付きの異種 MCP グラフとして編成します。推論時に、BioManus はコンパクトなタスク固有のサブグラフを取得し、操作レベルのワークフロー スキャフォールドを合成します。この設計は、計画の複雑さを生の工具在庫サイズから切り離し、高リコール取得下で Theta(N / (h * m_bar)) のコンテキスト圧縮率を達成します。ここで、N は総工具数、h はワークフロー範囲、m_bar (N よりもはるかに小さい) は操作ごとの候補工具の平均数です。 BioAgentBench と LAB-Bench の実験では、BioManus が高度な生物医学エージェントのベースラインと比較して、実行精度、ワークフローの有効性、およびコンテキストの効率を向上させることが示されています。この研究はパラダイム シフトを示唆しています。スケーラブルな生物医学的推論には、ますます大規模になるプロンプト レベルのツール検索ではなく、構造化された実行可能な機能グラフが必要です。
原文 (English)
Beyond Prompt-Based Planning: MCP-Native Graph Planning-based Biomedical Agent System
Biomedical agents promise to automate complex biological workflows, yet current systems face two fundamental bottlenecks: bioinformatics tools are highly heterogeneous in interfaces and execution environments, while agent planning still relies on flat prompt-retrieved tool descriptions. As biomedical software ecosystems grow, this coupling between tool coverage and context size leads to tool confusion, unstable planning, and inefficient execution. We introduce BioManus, an MCP-native biomedical agent built on graph-scaffolded planning over structured biological capabilities. BioManus first introduces the BioinfoMCP Compiler, which converts heterogeneous bioinformatics software into standardized MCP servers, yielding a large executable MCP ecosystem. It then organizes this ecosystem as a typed heterogeneous MCP graph over tools, operations, datatypes, and workflow stages. At inference time, BioManus retrieves compact task-specific subgraphs, synthesizes operation-level workflow scaffolds. This design decouples planning complexity from raw tool inventory size, achieving a context compression ratio of Theta(N / (h * m_bar)) under high-recall retrieval, where N is the total tool count, h is the workflow horizon, and m_bar (much smaller than N) is the average number of candidate tools per operation. Experiments on BioAgentBench and LAB-Bench show that BioManus improves execution accuracy, workflow validity, and context efficiency over advanced biomedical agent baselines. This work suggests a paradigm shift: scalable biomedical reasoning requires structured executable capability graphs rather than increasingly larger prompt-level tool retrieval.
シミュレーション、推論、決定: シミュレーション主導の意思決定のための LLM による科学的推論
科学シミュレータは、一か八かのシミュレーション主導の意思決定のために、LLM 主導のシステムにますます統合されています。ただし、既存のフレームワークは主に LLM を使用してシミュレータを生成、調整、実行し、シミュレータを推論可能な構造化された機構システムとしてではなく、ブラックボックス インターフェイスとして扱います。その結果、現在のアプローチには、シミュレータの動作の根底にある仮定やメカニズムを特定、表現、推論する能力が欠けており、透明性、監査可能性、意思決定の正当性が制限されています。実行可能な科学シミュレーター用のメカニズムに基づいた神経記号推論フレームワークである MechSim を紹介します。主に静的な記号構造を推論する従来の神経記号アプローチとは異なり、MechSim を使用すると、LLM エージェントが科学シミュレーターのメカニズム、仮定、および実行動作について推論できるようになります。私たちのフレームワークは、仮定、変数、メカニズムの依存関係、および実行トレースをキャプチャする共有構造化スキーマを通じてシミュレーターを表します。この表現に加えて、LLM エージェントは制約付き推論エンジンとして動作し、シミュレータの結果をその基礎となるメカニズムに結び付ける、構造化された証拠に基づいた説明を生成します。私たちは、複数のハイステークス領域にわたってアプローチを評価し、それがメカニズムレベルの説明の品質、シミュレーター分析、下流の意思決定の信頼性を向上させることを示しました。
原文 (English)
Simulate, Reason, Decide: Scientific Reasoning with LLMs for Simulation-Driven Decision Making
Scientific simulators are increasingly being integrated into LLM-driven systems for high-stakes simulation-driven decision-making. However, existing frameworks primarily use LLMs to generate, calibrate, or execute simulators, treating them as black-box interfaces rather than as structured mechanistic systems that can be reasoned about. As a result, current approaches lack the ability to identify, represent, and reason about the assumptions and mechanisms underlying simulator behavior, limiting transparency, auditability, and decision justification. We introduce MechSim, a mechanism-grounded neuro-symbolic reasoning framework for executable scientific simulators. Unlike prior neuro-symbolic approaches that primarily reason over static symbolic structures, MechSim enables LLM agents to reason about the mechanisms, assumptions, and execution behavior of scientific simulators. Our framework represents simulators through a shared structured schema capturing assumptions, variables, mechanism dependencies, and execution traces. On top of this representation, LLM agents operate as constrained reasoning engines that generate structured, evidence-grounded explanations linking simulator outcomes to their underlying mechanisms. We evaluate our approach across multiple high-stakes domains and show that it improves mechanism-level explanation quality, simulator analysis, and downstream decision-making reliability.
MapAgent: 都市規模の車線レベルの地図生成のための産業グレードのエージェント フレームワーク
車線レベルの地図は自動運転と車線レベルのナビゲーションにとって重要なインフラストラクチャですが、数百の都市で標準化された車線ネットワークの構築と維持には依然として非常に労働集約的です。最近のエンドツーエンドのベクトル化マッピング手法は、センサー データから直接車線の形状とトポロジを予測できますが、通常、マッピング仕様と交通規制を暗黙的なデータセット依存の監視として扱います。さらに、複雑なシーン (マーキングやオクルージョンの磨耗や欠落など) では、正しいレーン構成が視覚的証拠だけでは十分に決定されないことが多く、仕様違反が人間による事後編集の主な原因となっています。私たちは、仕様に準拠したレーンマップ作成のためのベクトル化バックボーンを強化する産業グレードのエージェント アーキテクチャである MapAgent を提案します。 MapAgent は、単にマップ予測にエージェント ループを追加するのではなく、バックボーンの認識と明示的な仕様の検証、制約を意識した推論、および境界のある検証主導型のジャッジ-プランナー-ワーカー ループの下での決定論的なマップ編集を結合します。視覚言語を使用するジャッジは、視覚的な証拠とドラフトベクトルを共同で検査することでエラーを診断し、ツールを呼び出すプランナーは編集後の再検証により最小限の修正編集を生成します。都市規模の本番環境でのスケーラビリティを維持するために、MapAgent はバックボーンの信頼性が低いタイルでのみ選択的にトリガーされ、スループットを維持しながら適度なオーバーヘッドを追加します。現実世界のデータセットでの実験では、特に複雑でロングテールのシナリオにおいて、強力な実稼働ベースラインを上回る一貫した利益が示されています。さらに、MapAgent は Baidu Maps に統合されており、全国 360 以上の都市の車線レベルの地図生成をサポートし、全体的な生産自動化を 95% 以上に高め、大規模な車線レベルの地図生成における MapAgent の実用性と有効性を実証しています。
原文 (English)
MapAgent: An Industrial-Grade Agentic Framework for City-scale Lane-level Map Generation
Lane-level maps are critical infrastructure for autonomous driving and lane-level navigation, yet constructing and maintaining standardized lane networks for hundreds of cities remains highly labor-intensive. Recent end-to-end vectorized mapping methods can predict lane geometry and topology directly from sensor data, but they typically treat mapping specifications and traffic regulations as implicit, dataset-dependent supervision. Moreover, in complex scenes (e.g., worn or missing markings and occlusions), correct lane configurations are often under-determined by visual evidence alone, making specification violations a major source of human post-editing. We propose MapAgent, an industrial-grade agentic architecture that augments a vectorization backbone for specification-compliant lane-map production. Rather than merely adding an agent loop to map prediction, MapAgent couples backbone perception with explicit specification verification, constraint-aware reasoning, and deterministic map editing under a bounded, verification-driven Judge-Planner-Worker loop. A vision-language Judge diagnoses errors by jointly inspecting visual evidence and draft vectors, while a tool-calling Planner generates minimal corrective edits with post-edit re-validation. To remain scalable for city-scale production, MapAgent is selectively triggered only on tiles with low backbone confidence, adding modest overhead while preserving throughput. Experiments on real-world datasets show consistent gains over strong production baselines, especially in complex and long-tail scenarios. Additionally, MapAgent has been integrated into Baidu Maps, supporting lane-level map generation for over 360 cities nationwide and elevating the overall production automation to over 95%, demonstrating MapAgent's practicality and effectiveness for large-scale lane-level map generation.
パラメトリック メモリを介した自己進化エージェントのスケーリング
既存のメモリ拡張 LLM エージェントは、ロールアウト中モデル パラメータを凍結したままにしながら、過去の経験をテキストの要約または取得された一節としてプロンプト領域にのみ保存します。このようなエージェントは、見たものを \emph{調べる}ことはできますが、それから \emph{学ぶ}ことはできません。彼らのポリシーは経験によって変更されず、コンテキストからドロップされた情報は永久に失われます。私たちは、自己進化するパラメトリック メモリ フレームワークである \texttt{TMEM} を導入します。このフレームワークでは、エージェントが履歴を明示的メモリに圧縮するだけでなく、軽量のオンライン アップデートを通じて抽出された監視を高速な LoRA 重み $\Delta_t$ に吸収し、単一のエピソード内で将来の動作を真に変更します。これを、高速重みロールアウト ダイナミクスを備えたエージェントの意思決定プロセスとして形式化します。アクションは $\pi_{\theta_0+\Delta_t}$ からサンプリングされ、抽出アクションは後続の決定のために $\Delta_t$ を更新する監視を生成します。このビューにより、抽出ポリシーが RL によって直接最適化可能になります。$\theta_0$ のトレーニングにより、タスク アクションだけでなく、オンライン LoRA 適応に使用されるデータの品質も向上します。さらに、オンラインコンバージェンスを加速するために、SVD ベースの LoRA サブスペースの初期化を提案します。 LoCoMo、LongMemEval-S、多目的検索、および CL-Bench の実験では、\texttt{TMEM} がさまざまなモデル スケールにわたって、要約ベースおよび検索ベースのベースラインを一貫して上回るパフォーマンスを示しています。
原文 (English)
Scaling Self-Evolving Agents via Parametric Memory
Existing memory-augmented LLM agents store past experience exclusively in prompt space, as textual summaries or retrieved passages, while keeping model parameters frozen throughout a rollout. Such agents can \emph{look up} what they have seen but cannot \emph{learn from} it: their policy is unchanged by experience, and any information dropped from the context is permanently lost. We introduce \texttt{TMEM}, a self-evolving parametric memory framework in which the agent not only compresses history into explicit memory but also absorbs distilled supervision into fast LoRA weights $\Delta_t$ via lightweight online updates, genuinely altering its future behavior within a single episode. We formalize this as an agentic decision process with fast-weight rollout dynamics: actions are sampled from $\pi_{\theta_0+\Delta_t}$, while extraction actions produce supervision that updates $\Delta_t$ for subsequent decisions. This view makes the extraction policy directly optimizable by RL: training $\theta_0$ improves not only task actions but also the quality of the data used for online LoRA adaptation. We further propose SVD-based initialization of the LoRA subspace to accelerate online convergence. Experiments on LoCoMo, LongMemEval-S, multi-objective search, and CL-Bench show that \texttt{TMEM} consistently outperforms summary-based and retrieval-based baselines across different model scales.
Neetyabhas: Rational エージェントベースのモデルにおける不確実性を認識した公共政策最適化のためのフレームワーク
目的 WHO の新型コロナウイルス感染症に対する非医薬品介入(ロックダウン、ワクチン接種など)は感染を効果的に抑制しますが、経済的には大きな負担となります。既存の研究は、個人の行動を無視し、完璧な感染追跡と完璧な政策実行を誤って想定しており、現実世界の不確実性や誤りを説明できていないことがよくあります。方法 我々は、流行の測定(感染症/入院)と政策実施の両方に不確実性を組み込んだ統合的アプローチを提案します。私たちは、マスクの着用、ワクチン接種、買い物に関するリアルタイムの選択を行う 1,000 人の個人のシミュレーション モデルを構築しました。同時に、政策立案者は健康と経済の観察に基づいて介入(ロックダウン、義務化)を展開します。このフレームワークは階層型強化学習エージェントによって駆動され、不確実性を考慮したポリシー勾配バリアント (DDPG および TD3) とともにディープ Q ネットワークを利用します。結果 シミュレーションは流行の進行を効果的に管理しました。マスクとワクチン接種が非常に効果的であることが証明され、流行のピークの高さと期間の両方が大幅に短縮されました。個人の行動、政策の不確実性、多面的な介入を統合することで、私たちの動的制御アプローチは流行の影響を軽減することに成功しました。結論 私たちのモデルは、不確実性と人間の行動を公衆衛生政策の枠組みに組み込むことで、これまでの研究の限界を克服しました。このシミュレーションは、マスクとワクチンが極めて重要なツールとして機能し、複雑なパンデミック時に効果的な介入を設計するには、個人の選択と不完全なデータを考慮することが重要であることを示しています。
原文 (English)
Neetyabhas: A Framework for Uncertainty-Aware Public Policy Optimization in Rational Agent-Based Models
Purpose The WHO's COVID-19 non-pharmaceutical interventions (e.g., lockdowns, vaccinations) effectively curb transmission but impose heavy economic strains. Existing research often neglects individual behaviors and falsely assumes perfect infection tracking and flawless policy execution, failing to account for real-world uncertainties and errors. Methods We propose an integrative approach incorporating uncertainties in both epidemic measurement (infections/hospitalizations) and policy implementation. We built a simulation model of 1,000 individuals making real-time choices regarding mask-wearing, vaccination, and shopping. Concurrently, policymakers deploy interventions (lockdowns, mandates) based on health and economic observations. This framework is driven by hierarchical reinforcement learning agents, utilizing deep Q-networks alongside uncertainty-aware policy gradient variants (DDPG and TD3). Results The simulations effectively managed the epidemic's progression. Masking and vaccinations proved highly effective, significantly reducing both the outbreak's peak height and duration. By integrating individual behaviors, policy uncertainties, and multifaceted interventions, our dynamic control approach successfully mitigated the epidemic's impact. Conclusions Our model overcomes previous research limitations by embedding uncertainty and human behavior into public health policy frameworks. The simulation demonstrates that accounting for individual choices and imperfect data is crucial for designing effective interventions during complex pandemics, with masks and vaccines serving as pivotal tools.
SCI-PRM: 科学的推論検証のためのツール認識プロセス報酬モデル
プロセス報酬モデル (PRM) は数学的推論において目覚ましい成功を収めていますが、生物学、化学、物理学などの複雑な科学分野での応用はほとんど未踏のままです。科学的な問題には、論理的な厳密さだけでなく、事実の一貫性や分野固有のツールの正確な使用法も要求されますが、この領域では、現在のモデルが幻覚や検証の欠如に悩まされることがよくあります。この論文では、まず、推論と科学ツールの実行を明示的にインターリーブするツールチェーンの軌跡を特徴とする大規模なデータセットである SCIPRM70K を構築します。これに基づいて、Sci-PRM と呼ばれる効率的な報酬モデルをトレーニングして、1 つの推論の各ステップでツールの選択、実行精度、結果の解釈をきめ細かく監視します。実験では、Sci-PRM が 2 つの重要な側面で基礎モデルを大幅に強化することが実証されています。(1) Best-of-N 選択による効果的なテスト時間のスケーリングを可能にします。 (2) 強化学習に統合すると、利点の消失という重大な問題を軽減する高密度の報酬シグナルとして機能し、モデルが既存のパフォーマンスの上限を突破できるようになります。
原文 (English)
SCI-PRM: A Tool Aware Process Reward Model for Scientific Reasoning Verification
While Process Reward Models (PRMs) have achieved remarkable success in mathematical reasoning, their application in complex scientific domains-such as biology, chemistry, and physics remains largely unexplored. Scientific problems demand not only logical rigor but also factual consistency and the precise usage of domain-specific tools, areas where current models often suffer from hallucinations and lack of verification. In this paper, we first construct SCIPRM70K, a large-scale dataset featuring Chain-of-Tool trajectories that explicitly interleave reasoning with the execution of scientific tools. Building upon this, we train an efficient reward model called Sci-PRM to provide fine-grained supervision on tool selection, execution accuracy, and result interpretation at each step in one inference. Experiments demonstrate that Sci-PRM significantly enhances foundation models in two key aspects: (1) it enables effective test-time scaling via Best-of-N selection; and (2) when integrated into Reinforcement Learning, it serves as a dense reward signal that mitigates the critical issue of advantage disappearance, allowing the model to break through existing performance ceilings.
コスト分割による許容可能なヒューリスティックの学習
許容可能なヒューリスティックは最適な計画を立てるために不可欠ですが、過大評価のリスクがあるため、ヒューリスティックを学習することは依然として困難です。コスト分割では、許容性を維持しながら複数の抽象化ヒューリスティックを組み合わせますが、最適な分割をオンラインで計算するにはコストがかかります。コスト分割と乗数予測の間のラグランジュ双対等価性を利用して、許容可能なコスト分割を推測する方法を学習するフレームワークを提案します。計画の状態とパターンはラベル付きグラフとしてエンコードされ、Weisfeiler-Leman アルゴリズムのアクション中心の変形により構造的特徴ベクトルが抽出されます。軸方向のセルフアテンションとソフトマックス出力層を備えたディープ アーキテクチャは、これらの機能を構築によるパーティション制約を満たすコストの重みにマップし、許容性を確保します。実験では、厳密な許容性を維持しながら、最適ではない分割ベースラインと比較してノード拡張が減少していることが実証されています。私たちの知る限り、これは許容されることが保証された最初の機械学習ヒューリスティックです。
原文 (English)
Learning Admissible Heuristics via Cost Partitioning
Admissible heuristics are essential for optimal planning, yet learning them remains challenging due to the risk of overestimation. Cost partitioning combines multiple abstraction heuristics while preserving admissibility, but computing optimal partitions online is expensive. We propose a framework that learns to infer admissible cost partitions by leveraging the Lagrangian dual equivalence between cost partitioning and multiplier prediction. Planning states and patterns are encoded as labelled graphs, and an action-centric variant of the Weisfeiler-Leman algorithm extracts structural feature vectors. A deep architecture with axial self-attention and a softmax output layer maps these features to cost weights that satisfy the partition constraints by construction, ensuring admissibility. Experiments demonstrate reduced node expansions compared to suboptimal partitioning baselines while maintaining strict admissibility. To our knowledge, this is the first machine-learned heuristic guaranteed to be admissible.
最初に計画し、後で判断し、より良く実行する: DMAIC からインスピレーションを得た産業異常検出用エージェント システム
大規模言語モデル (LLM) エージェントは、複雑なデータ分析ワークフローの自動化において有望であることが示されていますが、一か八かの産業シナリオにおいてその信頼性の高い導入は依然として困難です。産業異常検出 (IAD) は製造の品質、安全性、効率に不可欠ですが、既存の LLM ベースの IAD エージェントは主に実行に焦点を当てており、戦略策定は不十分です。その結果、統一的かつコスト効率の高い方法で異種のモダリティを処理するのに苦労しています。 DMAIC 品質管理フレームワークからインスピレーションを得て、当社は DMAIC-IAD (DMAIC にインスピレーションを得た Agentic Industrial Anomaly Detection) を提案します。これは、LLM エージェントを構造化された産業問題解決と連携させる、「最初に計画し、後で判断する」マルチエージェント システムです。 DMAIC-IAD は、戦略生成前に異種参照を標準化操作手順 (SOP) に抽出し、事前トレーニングされた実行不要の判定モデルを導入して、コストのかかる実行時トライアルを行わずに候補戦略をランク付けします。 4 つのモダリティにわたる広範な実験により、DMAIC-IAD は適用可能な薬剤ベースラインよりも平均検出パフォーマンスが 37.76% 向上することが示されています。
原文 (English)
Plan First, Judge Later, Run Better: A DMAIC-Inspired Agentic System for Industrial Anomaly Detection
Large language model (LLM) agents have shown promise in automating complex data-analysis workflows, but their reliable deployment remains challenging in high-stakes industrial scenarios. Industrial anomaly detection (IAD) is essential for manufacturing quality, safety, and efficiency, yet existing LLM-based IAD agents mainly focus on execution while under-exploiting strategy formulation. Consequently, they struggle to handle heterogeneous modalities in a unified and cost-effective manner. Inspired by the DMAIC quality-management framework, we propose DMAIC-IAD (DMAIC-inspired Agentic Industrial Anomaly Detection), a "Plan First, Judge Later" multi-agent system that aligns LLM agents with structured industrial problem-solving. DMAIC-IAD distills heterogeneous references into standardized operating procedures (SOPs) before strategy generation, and introduces a pre-trained execution-free judge model to rank candidate strategies without costly runtime trials. Extensive experiments across four modalities show that DMAIC-IAD improves average detection performance over applicable agentic baselines by 37.76%.
パルテノン法: 自己進化する弁護士の枠組み
エージェントの能力が高まるにつれて、法律分野の LLM エージェントは、大量のドキュメントをレビュー可能な作業成果物に変えることを約束しますが、信頼性の高い導入には 3 つの障害に直面しています。1 つは、今日の最も強力なモデルとハーネスの組み合わせがエンドツーエンドの法的問題でどのように動作するかについての大規模な証拠がないことです。法的な業種に適合したエージェント アーキテクチャはなく、汎用ハーネスのみが使用されます。そして、新しい事実、権限、期限によって変化し続ける環境では、システムが自らの結果から学習するメカニズムがありません。それぞれに対応します。 Harvey LAB に関する大規模な実証研究 -- $12{,}510$ のエージェントの軌跡 -- は、フロンティアのエージェントでさえ 1 回のパスで問題を完了することには程遠いことを示しています。より強力なモデルを使用すると基準ごとの精度が向上しますが、厳密な問題の完了は停滞します。次に、\textsc{Parthenon} を導入します。これは、モデル、ハーネス、代理人の役割、法的知識、決定論的なツール、および手続き上のスキルを情報源の追跡可能性、日付と番号の根拠、成果物のコンプライアンス、および問題の解決のための監査可能な表面に組み込む、自己進化する法律代理人のフレームワークです。最後に、漏れ防止学習ループにより、スコアリングされた失敗がタスクに依存しないスキル、ツール、知識の編集に変換され、企業が問題ごとにチェックリストとプレイブックを洗練するように、モデルの重みに触れることなく、経験とともにシステムが改善されます。私たちの大規模な実証分析を通じて、\textsc{Parthenon} は法的問題のタスクにおける最先端のモデルとハーネスのパフォーマンスを大幅に向上させました。
原文 (English)
Parthenon Law: A Self-Evolving Legal-Agent Framework
As agents grow more capable, legal-domain LLM agents promise to turn document-heavy matters into reviewable work products -- yet reliable deployment faces three obstacles: no large-scale evidence on how today's strongest model-and-harness combinations behave on end-to-end legal matters; no agent architecture adapted to the legal vertical, only general-purpose harnesses; and, in a setting that keeps shifting with new facts, authorities, and deadlines, no mechanism for systems to learn from their own outcomes. We address each. A large-scale empirical study on Harvey LAB -- $12{,}510$ agent trajectories -- shows that even frontier agents remain far from completing matters in a single pass: per-criterion accuracy climbs with stronger models while strict matter completion stalls. We then introduce \textsc{Parthenon}, a self-evolving legal-agent framework that factors Model, Harness, Agent roles, legal Knowledge, deterministic Tools, and procedural Skills into auditable surfaces for source traceability, date and number grounding, deliverable compliance, and issue closure. Finally, an anti-leakage learning loop converts scored failures into task-agnostic edits to skills, tools, and knowledge, letting the system improve with experience -- as a firm refines its checklists and playbooks after each matter -- without touching model weights. Across our large-scale empirical analysis, \textsc{Parthenon} substantially improves the performance of state-of-the-art models and harnesses on legal-matter tasks.
ASP ベースのコンプライアンス推論のための規範的な中間表現
我々は、ASP ベースのコンプライアンス推論のためのモーダル化出力規範中間表現である MONIR を提案します。そのコア フラグメントには段階的な操作セマンティクスがあり、MONIR-ASP は外部関数、一時的なルール、および安定したモデル推論のための実行可能なコンパイルと拡張機能を提供します。 LLM 支援パイプラインを使用して、中国の ADAS 規制と標準に関するフレームワークをインスタンス化します。実験では、抽出品質と、モジュール式および増分 ASP 解決の効率を評価します。
原文 (English)
A Normative Intermediate Representation for ASP-Based Compliance Reasoning
We propose MONIR, a Modalized-Output Normative Intermediate Representation for ASP-based compliance reasoning. Its core fragment has a staged operational semantics, while MONIR-ASP provides an executable compilation and extensions for external functions, temporal rules, and stable-model reasoning. We instantiate the framework on Chinese ADAS regulations and standards with an LLM-assisted pipeline. Experiments evaluate extraction quality and the efficiency of modular and incremental ASP solving.
MIRAGE: 暗黙的推論と生成世界モデルを備えたモバイル エージェント
モバイル エージェントは、スクリーンショットや言語目標に基づいて日常のアプリケーションを操作することがますます期待されており、信頼性の高い制御には、画面のアフォーダンス、複数ステップのナビゲーション、および将来の状態の変化に関する推論が必要です。ただし、多くのエージェントはこの計算を長いテキストの思考連鎖として外部に出すため、対話が遅くなり、監視コストが増加し、展開が複雑になります。 MIRAGE は、目に見えるテキスト推論の痕跡から継続的な潜在推論表現を学習するフレームワークです。 MIRAGE は、明示的な推論をコンパクトな隠れ状態に変換し、エージェントが長い根拠を解読することなく内部的に推論できるようにします。また、生成世界モデルの目標も組み込まれています。つまり、潜在的な推論ベクトルが将来のスクリーンショットと一致し、エージェントが行動する前に今後のインターフェイスの状態を予測するようになります。これにより、隠れた計算が圧縮された思考表現と環境力学の将来を見据えたモデルの両方に変わります。推論時、MIRAGE は連続的な潜在空間で推論し、実行効率を向上させながらトークンの生成を削減します。 AndroidWorld では、MIRAGE は、4B アブレーションにおける明示的な思考連鎖の監視付き微調整と 3 ~ 5 倍低いデコード トークン バジェットを一致させ、同等の命令調整ベースラインを 10.2 ポイント改善します。 AndroidControl では、生成されるトークンが 75% 以上減少しながら、アクションのグラウンディングが向上します。
原文 (English)
MIRAGE: Mobile Agents with Implicit Reasoning and Generative World Models
Mobile agents are increasingly expected to operate everyday applications from screenshots and language goals, where reliable control requires reasoning over screen affordances, multi-step navigation, and future state changes. However, many agents externalize this computation as long textual chains of thought, which slows interaction, increases supervision cost, and complicates deployment. We introduce MIRAGE, a framework that learns continuous latent reasoning representations from visible textual reasoning traces. MIRAGE transfers explicit reasoning into compact hidden states, enabling the agent to reason internally without decoding long rationales. It also incorporates a generative world-model objective: latent reasoning vectors are aligned with future screenshots, encouraging the agent to anticipate upcoming interface states before acting. This turns hidden computation into both a compressed thought representation and a forward-looking model of environment dynamics. At inference time, MIRAGE reasons in continuous latent space, reducing token generation while improving execution efficiency. On AndroidWorld, MIRAGE matches explicit chain-of-thought supervised fine-tuning in the 4B ablation with a 3-5x lower decoded-token budget and improves a comparable instruction-tuned baseline by 10.2 points; on AndroidControl, it improves action grounding while generating over 75% fewer tokens.
BiNSGPS: 双方向の神経記号相互作用による幾何学問題解決
幾何学の問題解決は、人工知能に明確な課題をもたらします。既存のアプローチは通常 2 つのパラダイムに分類されます。1 つは適応性が限られている記号的方法、もう 1 つは幻覚を起こしやすい神経的方法です。最近のニューロシンボリックハイブリッドは主に一方向パイプラインに依存しており、ニューラル出力がフィードバックなしでソルバーに供給されるため、システムは初期段階のエラーに対して脆弱になります。この一方向のボトルネックを打破するために、MLLM アドバイザとシンボリック ソルバーの間で双方向ニューロシンボリック インタラクション (BiNS) を確立するフレームワークである BiNSGPS を提案します。 MLLM Adviser は、シンボリック ソルバーからのフィードバックを積極的に組み込んで、矛盾した形式表現を動的に修正したり、補助的な仮説を提案したりして、シンボリックの矛盾を解決し、複雑な演繹を容易にします。
原文 (English)
BiNSGPS: Geometry Problem Solving via Bidirectional Neuro-Symbolic Interaction
Geometry problem solving poses distinct challenges in artificial intelligence. Existing approaches typically fall into two paradigms: symbolic methods, which exhibit limited adaptability, and neural methods, which are prone to hallucinations. Recent neuro-symbolic hybrids predominantly rely on a unidirectional pipeline where neural outputs are fed into solvers without feedback, making system brittle to early-stage errors. To break this unidirectional bottleneck, we propose BiNSGPS, a framework that establishes Bidirectional Neuro-Symbolic Interaction (BiNS) between a MLLM Adviser and a Symbolic Solver. MLLM Adviser actively incorporates feedback from the symbolic solver to dynamically rectify inconsistent formal representations or propose auxiliary hypotheses, resolving symbolic conflicts and facilitating complex deductions.
Fog of Love: ゲーム環境における親和性ベースの強化学習による高潔なエージェントの動作のエンジニアリング
人工知能に高潔な行動を教え込むことへの関心が高まっています。提案された手法の 1 つは、親和性ベースの強化学習として知られています。これは、目的関数のポリシー正則化を使用して、報酬関数の設計に完全に依存することなく、善良な行動を奨励します。これまでのところ、この手法は、状態空間とアクション空間が最小限のグリッド ワールドやおもちゃの問題環境で有効であることが実証されています。この研究をより洗練された環境に拡張するために、Fog of Love として知られるロールプレイング ボード ゲームに基づく 2 プレイヤー マルチエージェント環境を導入します。この環境では、2 人のエージェントがそれぞれの美徳を満たすために競い合いながら、その関係を満たすために協力します。マルチエージェントの性質を考慮すると、これは複雑な問題であり、マルチエージェントの深い決定論的ポリシー勾配エージェントは競合も連携もうまくいきません。我々は、局所的な親和性が競争目的と協力目的の両方を達成する際のエージェントのパフォーマンスを向上させ、その結果、両方のドメインで総合スコアが優れているという証拠を提示します。これは、結果的に賢明な選択をもたらすだけでなく、エージェントの目的論を明確にし、その行動を人間レベルで解釈できるようにします。
原文 (English)
Fog of Love: Engineering Virtuous Agent Behavior with Affinity-based Reinforcement Learning in a Game Environment
Instilling virtuous behavior in artificial intelligence has seen increasing interest. One of the techniques proposed is known as affinity-based reinforcement learning, which uses policy regularization on the objective function to incentivize virtuous actions without being fully dependent on the reward function design. Thus far, this technique has been demonstrated to be effective in grid worlds and toy-problem environments with minimal state and action spaces. To expand this research to more sophisticated environments, we introduce a two-player multi-agent environment based on the role-playing board game known as Fog of Love. In this environment, two agents compete to fulfill their individual virtues, while also cooperating to satisfy their relationship. Given the multi-agent nature, this is a complex problem where multi-agent deep deterministic policy gradient agents neither compete nor cooperate successfully. We present evidence that localized affinities enhance agent performance in achieving both competitive and cooperative objectives, resulting from superior overall scores in both domains. This not only results in virtuous choices but also clarifies an agent's teleology and makes its behavior human-level interpretable.
FALSIFYBENCH: ルール発見ゲームを使用した LLM の帰納的推論の評価
大規模言語モデル (LLM) は、科学タスクにおける自律エージェントとして導入されることが増えています。しかし、これらのシステムが科学的発見に関連する帰納的推論の形式に効果的に関与できるかどうかは未解決の問題のままです。この研究では、古典的な Wason 2-4-6 タスクに触発された仮説主導型推論の評価フレームワークである FALSIFYBENCH を紹介します。このタスクでは、エージェントは例を繰り返し提案し、フィードバックを受け取ることによって隠れた意味論的特性を発見する必要があります。このタスクでは、科学的推論の重要な要素、つまり仮説の生成、証拠の収集、および証拠の確認と反証に応じた信念の修正を捉えます。モデルファミリーとスケールにわたる 12 個の LLM の評価では、最適なパフォーマンスに近いモデルはないものの、推論モデルは一般に命令調整モデルよりも強力な科学的推論であることがわかりました。成功の主な原動力は否定的なテストの能力です。仮説を積極的に反証しようとするモデルは、主に確認を求めるモデルよりも一貫して優れています。さらに、これまでの研究では無視されていたきめ細かいターンレベル分析により、モデルが仮説空間をナビゲートする方法における特定可能なパターンと失敗が結びついていることが明らかになりました。
原文 (English)
FALSIFYBENCH: Evaluating Inductive Reasoning in LLMs with Rule Discovery Games
Large language models (LLMs) are increasingly deployed as autonomous agents in scientific tasks. Yet whether these systems can effectively engage in forms of inductive reasoning relevant to scientific discovery remains an open question. In this work, we introduce FALSIFYBENCH, an evaluation framework for hypothesis-driven reasoning inspired by the classic Wason 2-4-6 task, in which agents must discover hidden semantic properties by iteratively proposing examples and receiving feedback. This task captures key elements of scientific reasoning: hypothesis generation, evidence gathering, and belief revision in response to both confirming and disconfirming evidence. Our evaluation of 12 LLMs across model families and scales shows that reasoning models are generally stronger scientific reasoners than instruction-tuned models, although no model comes close to optimal performance. The primary driver of success is the capacity for negative testing: models that actively seek to falsify their hypotheses consistently outperform those that primarily seek confirmation. Moreover, a fine-grained turn-level analysis, neglected in previous work, reveals that failure is tied to identifiable patterns in how models navigate the hypothesis space.
浅い安全性を超えた推論時の脆弱性: 世代の軌跡に沿った調整
安全性を考慮した大規模言語モデル (LLM) は、生成を有害な出力にリダイレクトする推論中の介入に対して依然として脆弱です。最近の研究では、これは浅い安全性であると考えられており、最初のいくつかの出力トークンに位置合わせが集中しています。浅い安全性は、より広範な推論時間の脆弱性の特殊なケースであり、任意の生成ステップでの短いトークンの注入によって、その後の安全性の動作が大幅に変更される可能性があることを示します。また、隠れ状態における拒否方向とのモデルの整合性は、そのような注入に対するそのロバスト性を予測しないこともわかり、内部状態だけが摂動下での生成挙動を決定しないことが明らかになりました。これに対処するために、シーケンス途中の摂動をシミュレートすることによって構築された生成軌跡にモデルを直接調整し、これによりシーケンス途中の注入に対する堅牢性が向上し、初期のトークン生成を悪用する攻撃に一般化されることを示します。私たちの研究では、堅牢な安全調整には、出力だけでなく、生成プロセス自体のトレーニングも必要であると主張しています。
原文 (English)
Inference-Time Vulnerability Beyond Shallow Safety: Alignment Along Generation Trajectories
Safety-aligned Large Language Models (LLMs) remain vulnerable to interventions during inference that redirect generation toward harmful outputs. Recent work attributes this to shallow safety, where alignment concentrates in the first few output tokens. We show that shallow safety is a special case of a broader inference-time vulnerability, in which short token injections at any generation step can substantially alter subsequent safety behavior. We also find that a model's alignment with refusal directions in its hidden states does not predict its robustness to such injection, revealing that internal state alone does not determine generation behavior under perturbation. To address this, we align models directly on generation trajectories constructed by simulating mid-sequence perturbation, and show that this improves robustness to mid-sequence injection and generalizes to attacks that exploit early-token generation. Our work argues that robust safety alignment requires training on the generation process itself, not only its outputs.
人間と AI のインタラクションにおけるマルチエージェントの相補性のツリーベースの定式化
相補性とは、人間と AI の相互作用 (HAI) が、そのメンバー間で利用可能な最良の予測ベンチマークを上回る場合のことです。この考え方は HAI 研究の中心ですが、相補性に関する正式な研究は依然として限られています。既存のフレームワークは、エージェントの予測がワークフローに依存したマルチエージェント プロトコルをどのように構成するかをモデル化していません。私たちは、マルチエージェント HAI における相補性のツリーベースの形式化を導入することで、このギャップを埋めます。 HAI プロトコルは、順序付けられたエージェントと役割の構成と、その葉が予測ベクトルによって装飾されている根付き平面バイナリ ツリーによって表されます。ローカルのバイナリ構成ルールがツリーに沿って再帰的に評価され、pointwise-min Oracle ベンチマークに対するツリー相対相補性関数が生成されます。 4 つの結果を証明します。まず、セレクターベースの HAI (自己依存性または AI 依存性を含む) は、タスク、損失、予測の品質に関係なく、相補性を達成できません。第 2 に、二乗損失での回帰では、相補性はグラウンド トゥルース ベクトルからのユークリッド距離の最小化に相当します。 $N=2$ の場合、最適な線形プーリング重みは閉じた形式と残差補正解釈を持ちます。第三に、線形局所構成の下では、すべてのプロトコル ツリーはリーフ重みの単体での重心座標チャートを定義します。プロトコルツリーのTamari-cover再パラメータ化は相補性を維持し、$N=4$の場合、五角形の恒等性を満たします。第四に、バイナリ分類では、標準ブレグマン損失や多くの有限ベルヌーイ $f$ 発散損失を含むエンドポイント単調損失の下では、内部の局所構成は相補性を達成できません。クロスエントロピー下のマルチクラス集約にも同様の障害が当てはまります。要約すると、私たちのフレームワークは、マルチエージェント回帰では相補性が達成可能ですが、局所的な凝集と損失関数に関する自然条件下での分類では妨げられることを示しています。
原文 (English)
Tree-Based Formalization of Multi-Agent Complementarity in Human-AI Interactions
Complementarity is the case in which a human--AI interaction (HAI) outperforms the best prediction benchmark available among its members. Although this idea is central in HAI research, formal work on complementarity remains limited. Existing frameworks do not model how agents' predictions compose into workflow-sensitive multi-agent protocols. We close this gap by introducing a tree-based formalization of complementarity in multi-agent HAI. An HAI protocol is represented by an ordered agent-role configuration together with a rooted planar binary tree whose leaves are decorated by prediction vectors. A local binary composition rule is evaluated recursively along the tree, yielding a tree-relative complementarity functional relative to a pointwise-min oracle benchmark. We prove four results. First, selector-based HAIs, including self- or AI-reliance, cannot achieve complementarity regardless of task, loss, or prediction quality. Second, in regression under squared loss, complementarity is equivalent to Euclidean distance minimization from the ground-truth vector; for $N=2$, the optimal linear-pooling weight has a closed form and a residual-correction interpretation. Third, under linear local composition, every protocol tree defines a barycentric coordinate chart on the simplex of leaf weights; Tamari-cover reparameterizations of protocol trees preserve complementarity, and for $N=4$, they satisfy the pentagon identity. Fourth, in binary classification, no internal local composition can achieve complementarity under endpoint-monotone losses, including standard Bregman and many finite Bernoulli $f$-divergence losses; an analogous obstruction holds for multiclass aggregation under cross-entropy. In summary, our framework shows that complementarity is attainable in multi-agent regression, but obstructed in classification under natural conditions on local aggregation and loss functions.
AIP: エージェントのスキルを学習および管理するためのグラフ表現
現在のエージェント スキルは、主に自由形式の散文で構成されており、エージェントはすべてのセッションでどのように行動するかを読み、解釈し、再導出する必要があります。これにより、2 つの複合的なコストが課せられます。実装の負荷が高いタスクの信頼性の低下と、特にモデルのトレーニングで過小評価されているドメイン固有の手順知識に関して、散文の編集は人間とエージェントの両方が苦労する脆弱なプロセスであるため、スキルの作成と改善が困難になります。エージェント命令プロトコル (AIP) は、スキルを指向実行グラフとしてモデル化することで両方に対処します。つまり、決定論的なスクリプトまたは自然言語記述に裏付けられたノードとしての個別のステップ、明示的に型指定された入力/出力エッジによって接続され、スキーマ検証された YAML 仕様によって管理されます。コンパイラのメタスキルは、人間が作成した既存のスキルをこの形式に変換します。利点は 2 つあります。まず、人間が作成したスキルを AIP にコンパイルすると、SkillsBench の 27 の実際のエージェント タスク全体で、Claude Sonnet の平均タスク報酬が 0.60 から 0.71 に、合格率が 53% から 67% に上昇しました。これは統計的に有意な向上 (Wilcoxon の符号付きランク p = 0.011) であり、12 対 2 のタスクで 13 の同点で勝利し、多くの場合、より短い実時間で達成されました。グラフは、自然言語からコード、コマンド、およびツール呼び出しを再導出するようにエージェントに要求するのではなく、精査された実行可能なユニットをエージェントに提供します。次に、作成と改善については、各スキルがスキーマ検証され、機能テストが可能で、ノードごとにアドレス指定できるため、障害を正確に診断して修復できます。作成されたスキルの 2 つの失敗がスクリプト レベルまで追跡されました。 AIP 仕様を調整して再コンパイルした後、どちらも回帰ゼロ (1 つのタスクが 0/5 から 5/5 に移行) で回復し、スキルの向上が散文的な書き直しではなく、測定可能なチューニング ループに変わりました。同じグラフ構造は、コーパス レベルのガバナンスとスキルのイントロスペクションをサポートし、スキルに対する強化学習のための自然なアクション スペースを提供します。
原文 (English)
AIP: A Graph Representation for Learning and Governing Agent Skills
Agent Skills today consist largely of free-form prose requiring the agent to read, interpret, and re-derive how to act in every session. This imposes two compounding costs: reduced reliability on implementation-heavy tasks, and difficulty in skill creation and improvement, since editing prose is a fragile process that both humans and agents struggle with, particularly for domain-specific procedural knowledge underrepresented in model training. The Agent Instruction Protocol (AIP) addresses both by modeling a skill as a directed execution graph: discrete steps as nodes backed by deterministic scripts or natural-language descriptions, connected by explicit typed input/output edges, and governed by a schema-validated YAML specification. A compiler meta-skill translates existing human-written skills into this form. The benefits are twofold. First, compiling human-written skills to AIP raised Claude Sonnet's mean task reward from 0.60 to 0.71 and pass rate from 53% to 67% across 27 real agent tasks from SkillsBench - a statistically significant gain (Wilcoxon signed-rank p = 0.011), winning 12 tasks to 2 with 13 ties - often in less wall-clock time. The graph delivers vetted, runnable units to the agent rather than asking it to re-derive code, commands, and tool calls from natural language. Second, on creation and improvement, because each skill is schema-validated, functionally testable, and addressable node-by-node, failures can be diagnosed and repaired precisely. Two authored-skill failures were traced to the script level. After adjusting the AIP spec and recompiling, both recovered with zero regressions (one task going from 0/5 to 5/5), turning skill improvement into a measurable tuning loop rather than a prose rewrite. That same graph structure supports corpus-level governance and skill introspection, and provides a natural action space for reinforcement learning over skills.
BiasGRPO: グループ相対ポリシーの最適化による、変動の大きい報酬環境におけるバイアス緩和の安定化
大規模言語モデル (LLM) での社会的バイアスの軽減には、明確な調整の課題が伴います。検証可能なタスクとは異なり、バイアスには単一の根拠が欠如しており、分散が大きく、主観的な報酬の状況が生じます。以前のプリファレンスベースの微調整方法には大きなトレードオフがありました。直接プリファレンス最適化 (DPO) はオフライン トレーニングに固有の探索の欠如によって制限されますが、近接ポリシー最適化 (PPO) は信頼性の低い批評家の推定値が原因でトレーニングが不安定になる可能性があります。この論文では、グループ相対ポリシー最適化 (GRPO) を使用して、サンプリングされた完了のグループ全体で報酬を正規化することで調整を安定化するフレームワークである BiasGRPO を提案します。価値関数をグループ相対ベースラインに置き換えることにより、私たちのアプローチは、オンライン トレーニングの探求の利点を維持しながら、不安定性を軽減します。 BiasGRPO は複数のベンチマークにわたって DPO および PPO を上回っており、その有効性が示されていることがわかりました。 GRPO を適応させるために、複数のドメインとコンテキストにまたがるデータセットを合成的に拡張します。また、計算効率が高く、知識の低下を回避しながら生成を効果的にガイドするカスタム バイアス報酬モデルを作成してリリースし、多目的 RLHF パイプラインにシームレスに統合できる貴重なリソースを提供します。
原文 (English)
BiasGRPO: Stabilizing Bias Mitigation in High-Variance Reward Landscapes via Group-Relative Policy Optimization
Mitigating social bias in Large Language Models (LLMs) presents a distinct alignment challenge: unlike verifiable tasks, bias lacks a single ground truth, creating a high-variance, subjective reward landscape. Previous preference-based fine-tuning methods have major trade-offs: Direct Preference Optimization (DPO) is limited by the lack of exploration inherent in offline training, while Proximal Policy Optimization (PPO) can lead to training instability due to potentially unreliable critic estimates. In this paper, we propose BiasGRPO, a framework using Group Relative Policy Optimization (GRPO) to stabilize alignment by normalizing rewards across a group of sampled completions. By substituting the value function with a group-relative baseline, our approach reduces instability while maintaining the exploration benefits of online training. We find that BiasGRPO outperforms DPO and PPO across multiple benchmarks, indicating its effectiveness. To adapt GRPO, we synthetically extend a dataset spanning multiple domains and contexts. We also create and release a custom bias reward model that effectively guides generation while being highly compute-efficient and avoiding knowledge degradation, providing a valuable resource that can be seamlessly integrated into multi-objective RLHF pipelines.
客観的等価性を超えて: 配車経路問題に対する LLM ベースの最適化モデリングのための制約注入
大規模言語モデル (LLM) は、自然言語の最適化問題を実行可能なソルバー コードに変換することが増えています。しかし、制約が密なオペレーション リサーチ (OR) 問題の場合、既存のデータ フィルタリングおよびトレーニング パイプラインは主に、差分テストや回答一致などの客観的等価信号に依存しています。これらの制約がテスト対象のインスタンスに拘束力を持たない場合、プログラムは偽の制約を追加したり、必要な制約を黙って省略したりしながら、この信号を渡すことができます。我々は、実現可能プローブを使用して偽の過剰制約プローブと 1 つの制約違反プローブを明らかにし、サイレント制約省略を明らかにする制約注入を提案します。差分テストと組み合わせると、二重検証機能が形成されます。運転上の制約が結合された代表的な制約密度の高い組み合わせ最適化テストベッドである配車経路問題 (VRP) 上でインスタンスを作成し、評価します。当社は、自然言語 VRP シナリオを Gurobi スクリプトに変換する 8B エンドツーエンド モデルである VRPCoder を、21 のバリアントをカバーする専門家によって検証された VRP ベンチマーク スイートとともに開発しています。ベリファイアは、データ合成中の拒否サンプリング フィルターとして、またグループ相対ポリシー最適化 (GRPO) のロールアウトごとの報酬として再利用されます。 4 つの VRP ベンチマーク全体で、VRPCoder-GRPO は平均 Pass@1 の 93\% に達し、3 つのベンチマークで Gemini-3.1-Pro Preview を上回り、Claude-Sonnet-4.5 を平均 28 ポイント上回り、以前の OR-LLM を平均 78 ポイント上回っています。
原文 (English)
Beyond Objective Equivalence: Constraint Injection for LLM-Based Optimization Modeling on Vehicle Routing Problems
Large language models (LLMs) increasingly translate natural-language optimization problems into executable solver code. Yet for constraint-dense operations research (OR) problems, existing data-filtering and training pipelines largely rely on objective-equivalence signals such as differential testing and answer agreement, which a program can pass while adding spurious constraints or silently omitting required ones, whenever those constraints are non-binding on the tested instance. We propose constraint injection, which uses feasible probes to expose spurious over-constraint and one-constraint-violating probes to reveal silent constraint omission. Combined with differential testing, it forms a dual verifier. We instantiate and evaluate it on vehicle routing problems (VRPs), a representative constraint-dense combinatorial optimization testbed with coupled operational constraints. We develop VRPCoder, an 8B end-to-end model that translates natural-language VRP scenarios into Gurobi scripts, together with an expert-verified VRP benchmark suite covering 21 variants. The verifier is reused as a rejection-sampling filter during data synthesis and as a per-rollout reward in group relative policy optimization (GRPO). Across four VRP benchmarks, VRPCoder-GRPO reaches 93\% average Pass@1, outperforms Gemini-3.1-Pro Preview on three benchmarks, exceeds Claude-Sonnet-4.5 by 28 average points, and surpasses prior OR-LLMs by 78 average points.
R-APS: 内省的敵対的パレート検索による制約付き設計のための構成推論とコンテキスト内メタ学習
大規模言語モデル (LLM) は、無制限のタスクに柔軟に対応しますが、システムが計画を立て、ツールを使用し、長期間にわたって動作する必要があるエージェント設定では、流暢さは信頼性の高い配信を保証しません。このギャップを 3 つの構造的欠陥が結合したものとして追跡します。エラーは位置特定されずに伝播し、最悪の場合の摂動は評価されず、蓄積された知識は決して無効になりません。私たちは、これらには根本原因が共有されていると主張します。つまり、アブダクティブ、反事実、メタ帰納的、修正的、帰納的推論は、共有されたコンテキストを矛盾する方向に引っ張ります。私たちは、Reflective Adversarial Pareto Search (R-APS) を導入します。これは、推論モード分解を介して 3 つの失敗すべてに共同で対処し、各推論モードに独自のコンテキストを割り当て、3 つのタイムスケールにわたる相互作用を調整する、私たちの知る限り最初の方法です。型付き検証批評家による段階的な構成推論 (失敗の局在化)、第一級のパレート目標 (堅牢性) としての感度に基づく反事実ストレステスト、および明示的なメタ帰納的ルール抽出です。 invalidation (persistent memory). R-APS は微調整を必要とせず、純粋に構造化されたプロトコル設計によってフリーズされた LLM 上で動作します。平面機構の合成 (ロボット工学、補綴物、機械設計) を評価し、すべての候補を運動学ソルバーでチェックします。 32 のターゲット軌道上で、R-APS は、均一摂動ベースラインよりも 3.5 倍厳しいロバスト性証明書、最初の許容までの反復が 46% 高速化、Enum+GA と比較して 2.1 倍の面取り距離の短縮を実現しながら、バー数と最悪の場合のロバスト性を共同制御します。小規模な 4B 推論に特化したモデルは、プロトコル内の汎用 70B バックボーンと競合することが証明されており、構造化プロトコルがモデルのスケールを部分的に相殺できることを示唆しています。
原文 (English)
R-APS: Compositional Reasoning and In-Context Meta-Learning for Constrained Design via Reflective Adversarial Pareto Search
Large language models (LLMs) are fluent on open-ended tasks, yet in agentic settings, where a system must plan, use tools, and act over extended horizons, fluency does not ensure reliable delivery. We trace this gap to three coupled structural failures: errors propagate without localization, worst-case perturbations go unevaluated, and accumulated knowledge is never invalidated. We argue these share a root cause: abductive, counterfactual, meta-inductive, corrective, and inductive reasoning pull a shared context in incompatible directions. We introduce Reflective Adversarial Pareto Search (R-APS), to our knowledge the first method addressing all three failures jointly via reasoning-mode decomposition, allocating each reasoning mode its own context and orchestrating interaction across three timescales: staged compositional reasoning with a typed validation critic (failure localization), sensitivity-guided counterfactual stress-testing as a first-class Pareto objective (robustness), and meta-inductive rule extraction with explicit invalidation (persistent memory). R-APS requires no fine-tuning and operates on a frozen LLM purely via structured protocol design. We evaluate on planar mechanism synthesis (robotics, prosthetics, mechanical design), with every candidate checked by a kinematic solver. On 32 target trajectories, R-APS delivers robustness certificates 3.5x tighter than uniform-perturbation baselines, 46% faster iterations-to-first-admission, and 2.1x Chamfer-distance reduction over Enum+GA while jointly controlling bar-count and worst-case robustness. Small 4B reasoning-specialized models prove competitive with general-purpose 70B backbones inside the protocol, suggesting structured protocols can partially offset model scale.
AICompanionBench: AI コンパニオンの安全性に関する審査員としての LLM のベンチマーク
Replika や Character.AI などの AI コンパニオン プラットフォームが急速に成長するにつれて、安全でない人間と AI の相互作用に対する懸念が強まっています。この研究では、AICompanionBench を導入します。AICompanionBench は、私たちの知る限り、きめ細かい安全リスク カテゴリの注釈が付けられた、人間と AI コンパニオンの会話の初の公的に利用可能なベンチマーク データセットです。このデータセットには、Reddit から収集され、性的行動、反社会的行動、身体的攻撃性、言葉による攻撃性、薬物乱用、自傷行為と自殺、制御、操作、無害の 9 つのカテゴリにわたる人間と AI のコラボレーションを通じて注釈が付けられた 2,123 件の実世界の Replika 会話が含まれています。このベンチマークを使用して、安全でない相互作用を検出するための LLM-as-judge フレームワークの下で 20 個の最先端のオープンソースおよびクローズドソース LLM を評価します。結果は、モデルのパフォーマンスに大きなばらつきがあり、より強力なモデルは全体的に高い精度を達成していますが、操作や有害であると誤って認識される無害な会話などの微妙なカテゴリに依然として苦戦していることがわかりました。私たちの調査結果は、現在の LLM は明示的な有害なコンテンツを効果的に検出できるものの、暗黙的な安全でない相互作用の特定には依然として限界があることを示唆しています。全体として、私たちの研究は AI コンパニオンシップの安全性研究のための新しいベンチマーク データセットに貢献し、LLM を使用した AI コンパニオン システムのモニタリングに関する洞察を提供します。データセットは、https://github.com/anonymousresearcher2026/AICompanionBench/blob/main/AICompanionBench.xlsx で公開されています。
原文 (English)
AICompanionBench: Benchmarking LLMs-as-Judges for AI Companion Safety
As AI companion platforms such as Replika and Character.AI rapidly grow, concerns about unsafe human-AI interactions have intensified. This study introduces AICompanionBench, to our knowledge the first publicly available benchmark dataset of human-AI companion conversations annotated with fine-grained safety risk categories. The dataset contains 2,123 real-world Replika conversations collected from Reddit and annotated through human-AI collaboration across nine categories: sexual behavior, antisocial behavior, physical aggression, verbal aggression, substance abuse, self-harm and suicide, control, manipulation, and no-harm. Using this benchmark, we evaluate 20 state-of-the-art open-source and closed-source LLMs under an LLM-as-judge framework for detecting unsafe interactions. Results show substantial variation in model performance, with stronger models achieving high overall accuracy but still struggling with nuanced categories such as manipulation, as well as benign conversations that are incorrectly identified as harmful. Our findings suggest that while current LLMs can effectively detect explicit harmful content, they remain limited in identifying implicit unsafe interactions. Overall, our work contributes a new benchmark dataset for AI companionship safety research and offers insights into monitoring AI companion systems using LLMs. The dataset is publicly available at: https://github.com/anonymousresearcher2026/AICompanionBench/blob/main/AICompanionBench.xlsx
能動推論とはどのようなタイプの推論ですか?
能動推論では、期待自由エネルギー (EFE) が目標指向の行動と情報探索の行動を統合し、意思決定を推論としてキャストします。最近の研究では、EFE 最小化が、認識的事前分布で強化された生成モデル上の変分自由エネルギー (VFE) 最小化として記述できることが示されました。拡張モデルの VFE は、予測モデルの VFE に明示的なエントロピー補正項を加えたものとして書き換えることができ、EFE の寄与が透明になることを証明します。次に、適切な EFE ベースの計画には、これらの認識論的修正と限界推論を政策最適化に変える計画修正を組み合わせる必要があり、EFE ベースの計画の完全な変分特性が得られることを示します。これにより、クロスエントロピー計画および完全な EFE ベースの計画にどの修正が必要かが明確になります。同じエントロピー補正された定式化により、より単純なアブレーションとともに、EFE ベースの計画のための詳細なメッセージ パッシング スキームが得られます。 3 つのグリッドワールド環境での実験では、観察が決定的な場合には計画修正がすでに役に立ちますが、観察が単に示唆的な場合には追加の観察側の認識論的修正が最も重要であることが示されています。
原文 (English)
What Type of Inference is Active Inference?
Active inference casts decision-making as inference, with the Expected Free Energy (EFE) unifying goal-directed and information-seeking behavior. Recent work showed that EFE minimization can be written as Variational Free Energy (VFE) minimization on a generative model augmented with epistemic priors. We prove that the VFE of the augmented model can be rewritten as the VFE of the predictive model plus explicit entropy-correction terms, making the EFE contribution transparent. We then show that proper EFE-based planning requires combining these epistemic corrections with a planning correction that turns marginal inference into policy optimization, yielding a full variational characterization of EFE-based planning. This clarifies which corrections are needed for cross-entropy planning and for full EFE-based planning. The same entropy-corrected formulation leads to a detailed message-passing scheme for EFE-based planning together with simpler ablations. Experiments on three grid-world environments show that the planning correction already helps when observations are decisive, whereas the additional observation-side epistemic corrections matter most when observations are merely suggestive.
Strabo: エージェント相互作用プロトコルの宣言的仕様と実装
ここ数年で、宣言型対話プロトコルに基づいたマルチエージェント システムのモデリングと実装が大きく進歩しました。私たちの貢献である Strabo は、これらの進歩と Agentic AI における現在進行中の業界の取り組みとの関連性を確立します。具体的には、AI エージェントの電子商取引インタラクションを標準化するための Google 主導の最近の取り組みである UCP (Universal Commerce Protocol) について検討します。私たちの演習は 2 つの部分に分かれています。 1 つは、チェックアウトを処理する UCP の部分を宣言型 Langshaw プロトコルとしてモデル化し、Langshaw のプログラミング モデルである Peach を使用してエージェントを実装することです。演習のこの部分では、正式な宣言的仕様の利点を引き出します。 2 つ目は、Peach エージェントが Google によって実装された UCP エージェントと相互運用できることを示し、それによって UCP に関するアプローチの忠実性を確立します。このような相互運用により、宣言型プロトコルとエージェントを従来の設定に段階的に導入することが可能になり、大規模な更新を必要とせずに EMAS のアイデアが実践に影響を与える可能性がある道筋が示されています。
原文 (English)
Strabo: Declarative Specification and Implementation of Agentic Interaction Protocols
The last few years have witnessed major advances in the modeling and implementation of multiagent systems based on declarative interaction protocols. Our contribution, Strabo, establishes the relevance of these advances to ongoing industry efforts in Agentic AI. Specifically, we consider UCP, the Universal Commerce Protocol, a recent Google-led effort to standardize e-commerce interactions for AI agents. Our exercise is in two parts. One, we model the part of UCP dealing with checkouts as a declarative Langshaw protocol and implement agents using Peach, a programming model for Langshaw. This part of the exercise brings out the advantages of formal, declarative specifications. Two, we show that Peach agents can interoperate with UCP agents implemented by Google, thereby establishing the fidelity of our approach with respect to UCP. Such interoperation enables the incremental introduction of declarative protocols and agents into a conventional setting, indicating a pathway by which EMAS ideas could influence practice without demanding a wholesale update.
AutoLab: フロンティア モデルは長期にわたる自動車の研究およびエンジニアリングの課題を解決できるか?
科学および工学の進歩は、基本的に長期にわたる反復プロセスです。つまり、変更を提案し、実験を実行し、結果を測定し、成果物を継続的に改良します。しかし、フロンティア モデルの既存のベンチマークは主に 1 回のターン応答または短期間のエージェントの軌道のいずれかを評価しており、長期間にわたる持続的な反復改善という課題を捉えることができません。このギャップに対処するために、超長期の閉ループ最適化のための新しいベンチマークである AutoLab を導入します。 AutoLab は、システム最適化、パズル & チャレンジ、モデル開発、CUDA カーネル最適化の 4 つの多様なドメインにわたる、専門家によって厳選された 36 の現実的なタスクで構成されています。各タスクは正しいが意図的に次善のベースラインから始まり、厳しい予算内でそれを改善するようエージェントに要求します。 17 の最先端モデルを評価すると、成功の主な予測因子は、エージェントの最初の試みの質ではなく、繰り返しのベンチマーク、編集、経験的フィードバックの組み込みに対するエージェントの粘り強さであることが明らかになりました。 claude-opus-4.6 は強力な長期最適化機能を示しますが、いくつかの独自モデルを含むほとんどのフロンティア モデルは途中で終了するか、最小限の進歩で予算を使い果たします。これらの結果は、自律エージェントにおける時間認識と永続的な反復の重要性を強調しています。私たちは完全なベンチマーク、評価ハーネス、タスク アーティファクトをオープンソース化し、真に有能な長期的なエージェントに向けた研究を加速します。
原文 (English)
AutoLab: Can Frontier Models Solve Long-Horizon Auto Research and Engineering Tasks?
Scientific and engineering progress is fundamentally a long-horizon iterative process: proposing changes, running experiments, measuring outcomes, and continuously refining artifacts. Yet existing benchmarks for frontier models primarily evaluate either single-turn responses or short-horizon agent trajectories, failing to capture the challenges of sustained iterative improvement over extended time horizons. To address this gap, we introduce AutoLab, a new benchmark for ultra long-horizon closed-loop optimization. AutoLab consists of 36 realistic, expert-curated tasks spanning four diverse domains: system optimization, puzzle & challenge, model development, and CUDA kernel optimization. Each task begins with a correct but deliberately suboptimal baseline and challenges agents to improve it within a strict wall-clock budget. Evaluating 17 state-of-the-art models reveals the dominant predictor of success is not the quality of an agent's initial attempt, but its persistence in repeatedly benchmarking, editing, and incorporating empirical feedback. While claude-opus-4.6 exhibits strong long-horizon optimization capabilities, most frontier models, including several proprietary ones, either terminate prematurely or exhaust their budgets with minimal progress. These results underscore the importance of time awareness and persistent iteration in autonomous agents. We open-source the full benchmark, evaluation harness, and task artifacts, to accelerate research toward truly capable long-horizon agents.
ノアの箱舟の知識索引
LLM の知識ベンチマークは 3 つの問題に直面しています。1 つは、規律の代表性を運用できないスケーリング主導の設計です。遅延コンセンサスを可能にする定額支払いアノテーション。制限されたテスト予算の下では、監査されていないランキングの不安定性。 261 のきめ細かい分野にわたる 899 項目のベンチマークである KINA を、2 つの正式な結果とともに紹介します。まず、専門家が導き出したアンカーよりも報道スタイルの目的として代表性を設定し、代理人を通じて規律上の代表性を操作して、(1-1/e) 貪欲な近似 (命題 1) を生成します。保証は代理人に適用され、母集団の代表性には適用されません。第二に、インセンティブ互換性しきい値 B > デルタ C / デルタ p_min (定理 1) で、ボーナスオンバートーナメントがリリースレビューの品質においてフラットペイメントを弱く FOSD で支配することを証明します。 13 のラボからの 42 モデルを評価すると、最上位モデルの Gemini-3.1-Pro-Preview は 53.17% に達し、続いて Claude-Opus-4.6 が 49.92%、GPT-5.4 が 48.55% となり、飽和以下にかなりのヘッドルームが残されています。完全なリーダーボードは、滑らかな全体の順序ではなく階層構造を示しています。小規模なフロンティア階層は 48% を超え、高密度の強力なモデル階層は約 38 ~ 45% に広がり、低パフォーマンスのモデルは 10% の確率ベースラインをわずかに上回る程度に留まっています。ツールの強化により、5 つのツール使用評価全体で最大 5.17 ポイントが加算され、そのゲインはモデルによって大幅に異なります。限られた予算の分散を明示し、隣接するランクの過度の解釈を防ぐために、ブートストラップのランキング安定性統計を報告します。
原文 (English)
Knowledge Index of Noah's Ark
Knowledge benchmarks for LLMs face three issues: scaling-driven designs that do not operationalize disciplinary representativeness; flat-payment annotation that permits lazy consensus; and unaudited ranking instability under bounded test budgets. We introduce KINA, an 899-item benchmark across 261 fine-grained disciplines, with two formal results. First, we cast representativeness as a coverage-style objective over expert-elicited anchors and operationalize disciplinary representativeness through a proxy, yielding a (1-1/e) greedy approximation (Proposition 1); the guarantee applies to the proxy, not to population representativeness. Second, we prove a bonus-on-bar tournament weakly FOSD-dominates flat payment in released-review quality, with incentive-compatibility threshold B > Delta C / Delta p_min (Theorem 1). Evaluating 42 models from 13 labs, the top model, Gemini-3.1-Pro-Preview, reaches 53.17%, followed by Claude-Opus-4.6 at 49.92% and GPT-5.4 at 48.55%, leaving substantial headroom below saturation. The full leaderboard shows a tiered structure rather than a smooth total order: a small frontier tier lies above 48%, a dense strong-model tier spans roughly 38-45%, and low-performing models remain only modestly above the 10% chance baseline. Tool augmentation adds up to 5.17 points across the five tool-use evaluations, with gains varying substantially across models. We report bootstrap ranking-stability statistics to make bounded-budget variance explicit and to discourage over-interpretation of adjacent ranks.
AI の具体的なものから抽象的なものへ: 一般の人々に人工知能の謎を解き明かす
人工知能(AI)は幅広い分野で導入されています。これは、一般の人々に AI の意味について最低限の理解を与える手段を開発することが不可欠であることを示しています。この記事では、ビジュアル プログラミングと WiSARD 無重力人工ニューラル ネットワークを組み合わせて、一般の人々 (子供を含む) がこの目標を達成できるようにする新しい方法論、具体から抽象への AI (AIcon2abs) を紹介します。が採用した主な戦略は、学習機械の開発に関連する実践的な活動や学習プロセスの観察を通じて、人工知能の謎を解くことを促進することです。したがって、人工知能メカニズムの導入に関わる議論や意思決定において、被験者を洞察力に富んだ主体にするのに役立つスキルを被験者に提供することが可能です。現在、プログラミングを通じて基本的な AI 概念を教える既存のアプローチでは、マシン インテリジェンスを外部要素/モジュールとして扱っています。トレーニング後、その外部モジュールは、学習者が開発しているメイン アプリケーションに結合されます。ここで提示する方法論では、トレーニング タスクと分類タスクの両方が、他のプログラミング構造と同様に、メイン プログラムを構成するブロックです。 AIcon2abs の有益な副作用として、データから学習できるプログラムと従来のコンピューター プログラムとの違いがより明確になります。さらに、WiSARD 無重力人工ニューラル ネットワーク モデルのシンプルさにより、トレーニングと分類タスクの内部実現を簡単に視覚化して理解することができます。
原文 (English)
AI from concrete to abstract: demystifying artificial intelligence to the general public
Artificial Intelligence (AI) has been adopted in a wide range of domains. This shows the imperative need to develop means to endow common people with a minimum understanding of what AI means. Combining visual programming and WiSARD weightless artificial neural networks, this article presents a new methodology, AI from concrete to abstract (AIcon2abs), to enable general people (including children) to achieve this goal. The main strategy adopted by is to promote a demystification of artificial intelligence via practical activities related to the development of learning machines, as well as through the observation of their learning process. Thus, it is possible to provide subjects with skills that contributes to making them insightful actors in debates and decisions involving the adoption of artificial intelligence mechanisms. Currently, existing approaches to the teaching of basic AI concepts through programming treat machine intelligence as an external element/module. After being trained, that external module is coupled to the main application being developed by the learners. In the methodology herein presented, both training and classification tasks are blocks that compose the main program, just as the other programming constructs. As a beneficial side effect of AIcon2abs, the difference between a program capable of learning from data and a conventional computer program becomes more evident. In addition, the simplicity of the WiSARD weightless artificial neural network model enables easy visualization and understanding of training and classification tasks internal realization.
機械はどのように学習するのでしょうか? AIcon2abs メソッドの評価
この研究は、幼稚園から高校までの学生を含むさまざまな年齢層にわたって機械学習 (ML) に対する国民の理解を高めるために設計された革新的なアプローチである AIcon2abs 手法 (具体から抽象への AI: 一般大衆への人工知能の謎を解く) を紹介した以前の研究を拡張し、その有効性を評価することを目的としています。 AIcon2Abs は、シンプルさとユーザー アクセシビリティで知られる無重力ニューラル ネットワークである WiSARD アルゴリズムを採用しています。 WiSARD はインターネットを必要としないため、技術者以外のユーザーやリソースが限られた環境に最適です。この方法により、参加者は、あたかもアルゴリズムそのものであるかのように、魅力的な実践的なアクティビティを通じて ML プロセスを直感的に視覚化し、対話することができます。この方法により、ユーザーは実践的な活動を通じてトレーニングと分類の内部プロセスを直感的に視覚化して理解することができます。 WiSARD の機能にインターネット接続が必要なくなると、たとえ 1 つの例であっても最小限のデータセットから効果的に学習できます。この機能を使用すると、ユーザーは、より多くのデータを受信するにつれてマシンがどのように精度を向上させるかを観察できます。さらに、WiSARD は学んだことを表す精神的な画像を生成し、機密データの重要な特徴を強調します。 AIcon2abs は、子供 5 人、青少年 5 人、成人 24 人を含む 34 人のブラジル人参加者による 6 時間の遠隔コースを通じてテストされました。データ分析は、混合法による事前実験(仮説検証を含む)と定性的現象学的分析の2つの観点から実施しました。ほぼすべての参加者が AIcon2abs を肯定的に評価し、その結果は意図した結果の達成に高い満足度を示しました。この研究はCEP-HUCFF-UFRJ研究倫理委員会によって承認されました。
原文 (English)
How do machines learn? Evaluating the AIcon2abs method
This study expands on previous work that introduced the AIcon2abs method (AI from Concrete to Abstract: Demystifying Artificial Intelligence to the general public), an innovative approach designed to increase public understanding of machine learning (ML) across diverse age groups, including K-12 students, and aims to evaluate its effectiveness. AIcon2Abs employs the WiSARD algorithm, a weightless neural network known for its simplicity, and user accessibility. WiSARD does not require Internet, making it ideal for non-technical users and resource-limited environments. This method enables participants to intuitively visualize and interact with ML processes through engaging, hands-on activities, as if they were the algorithms themselves. The method allows users to intuitively visualize and understand the internal processes of training and classification through practical activities. Once WiSARDs functionality does not require an Internet connection, it can learn effectively from a minimal dataset, even from a single example. This feature enables users to observe how the machine improves its accuracy incrementally as it receives more data. Moreover, WiSARD generates mental images representing what it has learned, highlighting essential features of the classified data. AIcon2abs was tested through a six-hour remote course with 34 Brazilian participants, including 5 children, 5 adolescents, and 24 adults. Data analysis was conducted from two perspectives: a mixed-method pre-experiment (including hypothesis testing), and a qualitative phenomenological analysis. Nearly all participants rated AIcon2abs positively, with the results demonstrating a high degree of satisfaction in achieving the intended outcomes. This research was approved by the CEP-HUCFF-UFRJ Research Ethics Committee.
DiffAero: 効率的なクアドローター ポリシー学習のための GPU アクセラレーションによる微分可能シミュレーション フレームワーク
このレターでは、効率的なクワッドローター制御ポリシー学習のために設計された、軽量で GPU アクセラレーションを備えた完全微分可能なシミュレーション フレームワークである DiffAero を紹介します。 DiffAero は、環境レベルとエージェント レベルの両方の並列処理をサポートし、複数のダイナミクス モデル、カスタマイズ可能なセンサー スタック (IMU、深度カメラ、LiDAR)、および多様な飛行タスクを統合された GPU ネイティブのトレーニング インターフェイス内に統合します。 DiffAero は、GPU 上で物理とレンダリングの両方を完全に並列化することで、CPU と GPU 間のデータ転送のボトルネックを排除し、シミュレーションのスループットを桁違いに向上させます。既存のシミュレータとは対照的に、DiffAero は高性能シミュレーションを提供するだけでなく、微分可能なハイブリッド学習アルゴリズムを探索するための研究プラットフォームとしても機能します。広範なベンチマークと実際の飛行実験により、DiffAero とハイブリッド学習アルゴリズムを組み合わせることで、消費者グレードのハードウェアで堅牢な飛行ポリシーを数時間で学習できることが実証されました。コードは https://github.com/flyingbitac/diffaero で入手できます。
原文 (English)
DiffAero: A GPU-Accelerated Differentiable Simulation Framework for Efficient Quadrotor Policy Learning
This letter introduces DiffAero, a lightweight, GPU-accelerated, and fully differentiable simulation framework designed for efficient quadrotor control policy learning. DiffAero supports both environment-level and agent-level parallelism and integrates multiple dynamics models, customizable sensor stacks (IMU, depth camera, and LiDAR), and diverse flight tasks within a unified, GPU-native training interface. By fully parallelizing both physics and rendering on the GPU, DiffAero eliminates CPU-GPU data transfer bottlenecks and delivers orders-of-magnitude improvements in simulation throughput. In contrast to existing simulators, DiffAero not only provides high-performance simulation but also serves as a research platform for exploring differentiable and hybrid learning algorithms. Extensive benchmarks and real-world flight experiments demonstrate that DiffAero and hybrid learning algorithms combined can learn robust flight policies in hours on consumer-grade hardware. The code is available at https://github.com/flyingbitac/diffaero.
SpurAudio: 少数ショット音声分類におけるショートカット学習を研究するためのベンチマーク
少数ショット分類 (FSC) は、限られたラベル付きデータから学習するために広く使用されていますが、ほとんどの評価は、ターゲットの概念が文脈上の手がかりから独立していることを暗黙的に前提としています。ただし、現実世界の設定では、サンプルがリッチ コンテキスト内に表示されることが多く、モデルが前景コンテンツと背景信号の間の偽の相関を利用できるようになります。このような効果は少数ショット画像分類で研究されていますが、少数ショット音声分類におけるその役割はほとんど解明されておらず、既存の音声ベンチマークでは文脈構造に対する制御が限られています。 SpurAudio というベンチマークを紹介します。これは、オーディオの前景イベントと背景環境の自然な分離性を活用して、サポートおよびクエリ セットにわたるコンテキストの変化を制御されたマルチレベルの評価を可能にするベンチマークです。このベンチマークを使用して、多くの最先端の少数ショット手法は、標準的な評価プロトコルで同様の精度を達成しているにもかかわらず、バックグラウンド相関が破壊されると重大なパフォーマンス低下に見舞われることがわかります。重要なのは、この脆弱性は大規模な事前トレーニング済みオーディオ基盤モデルでも存続しており、バックボーン容量の制限が説明の対象外となっているということです。さらに、従来のベンチマークでは同等に見える手法でも、偽の相関に対して著しく異なる感度を示す可能性があり、推論時に特徴表現が分類器ヘッドとどのように相互作用するかに関連する体系的なアルゴリズムの強みと脆弱性が明らかになります。これらの発見は、オーディオにおける少数ショット法の動作に関する新たな洞察を提供し、FSC モデルを評価する際のコンテキスト依存性を明示的に調査するベンチマークの必要性を強調しています。
原文 (English)
SpurAudio: A Benchmark for Studying Shortcut Learning in Few-Shot Audio Classification
Few-shot classification (FSC) is widely used for learning from limited labeled data, yet most evaluations implicitly assume that target concepts are independent of contextual cues. In real-world settings, however, examples often appear within rich contexts, allowing models to exploit spurious correlations between foreground content and background signals. While such effects have been studied in few-shot image classification, their role in few-shot audio classification remains largely unexplored, and existing audio benchmarks offer limited control over contextual structure. We introduce SpurAudio, a benchmark that leverages the natural separability of foreground events and background environments in audio to enable controlled, multi-level evaluation of contextual shifts across support and query sets. Using this benchmark, we show that many state-of-the-art few-shot methods suffer severe performance degradation when background correlations are disrupted, despite achieving similar accuracy under standard evaluation protocols. Crucially, this vulnerability persists even in large pretrained audio foundation models, ruling out limited backbone capacity as an explanation. Moreover, methods that appear comparable under conventional benchmarks can exhibit markedly different sensitivity to spurious correlations, revealing systematic algorithmic strengths and vulnerabilities tied to how feature representations interact with classifier heads at inference time. These findings provide new insight into the behavior of few-shot methods in audio and highlight the need for benchmarks that explicitly probe context dependence when evaluating FSC models.
相関マッチングによる制約強化物理検索
物理システムは、検索プロセスにノイズを加えるだけではありません。構造化された相関関係を生成する制約を課します。我々は、探索における時間的相関を、更新ダイナミクスにおける制約によって引き起こされる空間的相関と一致させる、制約強化物理探索の原理を提案する。最小限の綱引きバンディット モデル (TOW) を使用して、保存則が局所的な観察を複数の選択肢にわたる差分証拠に変換する一方で、時間的に相関する推進力が探索の順序を制御することを示します。検索効率は、より強力なランダム性や最大の逆相関によってではなく、フィードバックを証拠に変換する物理的な更新スケールに時間的相関を一致させることによって改善されます。スケーリング推定では、時間的逆相関をどの程度強く使用できるかを制限する主要なパラメーターとして更新ノイズ対コントラスト比が特定されます。この結果は、物理検索の一般的な組織化原則を示唆しています。つまり、制約と変動によって構造化された時空間相関が生成され、これらの相関が更新ダイナミクスと一致すると効率的な探索が可能になります。
原文 (English)
Constraint-Enhanced Physical Search through Correlation Matching
Physical systems do not merely add noise to search processes; they impose constraints that generate structured correlations. We propose a principle of constraint-enhanced physical search in which temporal correlations in exploration are matched to constraint-induced spatial correlations in the update dynamics. Using a minimal tug-of-war bandit model (TOW), we show that a conservation law converts local observations into differential evidence across alternatives, while a temporally correlated drive controls the order of exploration. Search efficiency is improved not by stronger randomness or by maximal anti-correlation, but by matching the temporal correlation to the physical update scale that converts feedback into evidence. A scaling estimate identifies the update-noise-to-contrast ratio as the leading parameter that limits how strongly temporal anti-correlation can be used. The results suggest a general organizing principle for physical search: constraints and fluctuations can generate structured spatiotemporal correlations, and efficient exploration emerges when these correlations are matched to the update dynamics.
臨床バイオマーカーに関する説明可能な機械学習を使用したアルツハイマー病の早期検出: アルツハイマー病神経画像イニシアチブ (ADNI) データセットを使用した多クラス分類研究
背景: アルツハイマー病 (AD) は、世界中で 5,500 万人以上の人々に影響を与えています。日常的な臨床評価による正常認知 (NC)、軽度認知障害 (MCI)、および AD の正確で解釈可能な検出は、依然として重要な満たされていないニーズです。方法: XGBoost 分類器は、アルツハイマー病神経画像イニシアチブ (ADNI) の 8 つの臨床特徴 (MMSE、CDR Global、CDR Sum of Boxes (CDR-SB)、MoCA、FAQ、年齢、性別、教育) を使用して 3 クラス検出用に開発されました。ハイパーパラメータは Optuna を使用して最適化されました (50 回のトライアル)。クラスの不均衡は SMOTE で解決されました。パフォーマンスは、1,000 回の反復ブートストラップ 95% 信頼区間、マクロ F1、バランスの取れた精度、およびコーエンのカッパを使用したマクロ AUC-ROC によって評価されました。 SHAP 値により、機能レベルの説明可能性が提供されました。結果: データセットには、1,641 人のベースライン被験者 (NC 608 人、MCI 767 人、AD 266 人) が含まれていました。 5 分割交差検証では、平均マクロ AUC は 0.983 (SD 0.007)、精度 0.944 (SD 0.006)、およびマクロ F1 0.929 (SD 0.008) でした。ホールドアウトされたテストセット (n = 247) では、マクロ AUC は 0.982 (95% CI: 0.965--0.995)、精度 0.943、バランス精度 0.932、マクロ F1 0.927、およびコーエンのカッパ 0.909 でした。 SHAP 分析では、CDR Global が NC および MCI の主要な予測因子であることが特定され、CDR-SB と MMSE が一緒になって AD 分類を推進しました。結論: ルーチンの臨床評価に基づいてトレーニングされた説明可能な機械学習モデルは、ほぼ完璧な 3 クラスのアルツハイマー病の検出を達成します。 SHAP 分析は、臨床的妥当性を裏付ける、臨床的に妥当なクラス固有の特徴の重要性パターンを明らかにします。将来の研究では、マルチモーダル検出のための音声バイオマーカーを使用してこのフレームワークを拡張します。
原文 (English)
Early Detection of Alzheimer's Disease Using Explainable Machine Learning on Clinical Biomarkers: A Multi-Class Classification Study Using the Alzheimer's Disease Neuroimaging Initiative (ADNI) Dataset
Background: Alzheimer's disease (AD) affects over 55 million people worldwide. Accurate, interpretable detection of normal cognition (NC), mild cognitive impairment (MCI), and AD from routine clinical assessments remains a critical unmet need. Methods: An XGBoost classifier was developed for three-class detection using eight clinical features from the Alzheimer's Disease Neuroimaging Initiative (ADNI): MMSE, CDR Global, CDR Sum of Boxes (CDR-SB), MoCA, FAQ, age, sex, and education. Hyperparameters were optimised using Optuna (50 trials); class imbalance was addressed with SMOTE. Performance was evaluated by macro AUC-ROC with 1,000-iteration bootstrap 95% confidence intervals, macro F1, balanced accuracy, and Cohen's kappa. SHAP values provided feature-level explainability. Results: The dataset comprised 1,641 baseline subjects (608 NC, 767 MCI, 266 AD). On five-fold cross-validation, mean macro AUC was 0.983 (SD 0.007), accuracy 0.944 (SD 0.006), and macro F1 0.929 (SD 0.008). On the held-out test set (n = 247), macro AUC was 0.982 (95% CI: 0.965--0.995), accuracy 0.943, balanced accuracy 0.932, macro F1 0.927, and Cohen's kappa 0.909. SHAP analysis identified CDR Global as the dominant predictor for NC and MCI, while CDR-SB and MMSE together drove AD classification. Conclusion: An explainable machine learning model trained on routine clinical assessments achieves near-perfect three-class Alzheimer's detection. SHAP analysis reveals clinically plausible, class-specific feature importance patterns supporting clinical validity. Future work will extend this framework with speech biomarkers for multimodal detection.
3 次元シーンにおける無人水中車両騒音スペクトル予測のための神経放射雑音場
無人水中飛行体 (UUV) の放射騒音は、音響特性を特徴づけ、プラットフォームの性能を評価するための重要な指標です。従来の物理ベースのモデリングと数値シミュレーション手法がターゲットの構造情報と環境境界条件に強く依存していること、および 3 次元シーンで連続的な空間スペクトル応答モデリングを実現できないことに対処するために、この論文では神経放射雑音場 (NRNF) を提案します。 NRNF は、UUV 放射ノイズ スペクトルを 3 次元 UUV 位置、3 次元ハイドロホン位置、UUV ヨー角、および周波数の連続関数として表し、任意の空間位置でのクエリベースの予測を可能にします。提案された方法は、位置と周波数の正弦波エンコードを採用し、環境構造と伝播効果を明示的に表現するために学習可能な 3 次元シーン特徴グリッドを導入します。スペクトル予測データセットは湖のトライアルから構築され、提案されたモデルは 3 つの設定 (水平外挿、深さ外挿、およびクロスラン一般化) の下で評価されます。結果は、NRNF が 50 ~ 5000 Hz 帯域で 3.5 dB の平均予測誤差を達成することを示しています。水平方向の外挿が最も簡単で、深さの外挿が最も難しく、クロスラン汎化は中程度の難易度です。さらにアブレーションの結果は、シーン フィーチャ グリッドがモデルの予測安定性と空間一般化を大幅に改善することを示しています。
原文 (English)
Neural Radiated-Noise Fields for Unmanned Underwater Vehicle Noise Spectrum Prediction in Three-Dimensional Scenes
Radiated noise in unmanned underwater vehicles (UUVs) is an important indicator for characterizing acoustic signatures and evaluating platform performance. To address the strong dependence of traditional physics-based modeling and numerical simulation methods on target structural information and environmental boundary conditions, and their inability to achieve continuous spatial spectrum-response modeling in three-dimensional scenes, this paper proposes a neural radiated-noise field (NRNF). An NRNF represents the UUV radiated-noise spectrum as a continuous function of the three-dimensional UUV position, the three-dimensional hydrophone position, the UUV yaw angle, and the frequency, enabling query-based prediction at arbitrary spatial locations. The proposed method employs sinusoidal encoding for position and frequency, and introduces a learnable three-dimensional scene feature grid to explicitly represent environmental structure and propagation effects. A spectrum-prediction dataset is constructed from lake trials, and the proposed model is evaluated under three settings: horizontal extrapolation, depth extrapolation, and cross-run generalization. Results show that the NRNF achieves an average prediction error of 3.5 dB in the 50 to 5000 Hz band. Horizontal extrapolation is easiest, depth extrapolation is the most challenging, and cross-run generalization is of intermediate difficulty. Further ablation results demonstrate that the scene feature grid significantly improves the prediction stability and spatial generalization of the model.
ディープ 2 サンプル テストに対する反事実の説明
2 サンプル テストは、科学分野全体の分布の違いを検出するための基本的なツールですが、従来のテスト (カーネルベースのテストを含む) は、画像などの高次元構造化データに対しては効果がない場合があります。最近のディープ 2 サンプル テストでは、有益な表現を学習することでこれらの設定での感度が向上しますが、どのデータ特徴が帰無仮説 $H_0$ の棄却につながるかについての洞察は限られています。この問題に対処するために、我々は、テストによって測定された不一致を明示的に削減しながら、観測値をソースグループからターゲットグループに移動させるサンプルレベルの編集を生成する、深い2サンプルテストのための反事実説明フレームワークを提案します。私たちの手法では、拡散オートエンコーダーと事前学習済みのディープ 2 サンプル テスト モデルを組み合わせ、テスト モデルの表現空間で最大平均不一致 (MMD) 目標を最適化して、もっともらしい反事実を生成します。検定統計量の変化とその結果得られる 2 サンプルの p 値を通じて、分布レベルの効果を定量化します。合成 2D 形状データセットと 2 つの MRI コホートでこの方法を評価します。どちらの設定でも、反事実変換により元のサンプルと比較して p 値が一貫して増加しており、編集されたソース セットが統計的にテスト下のターゲット分布に近づくことを示しています。 LPIPS を使用して最小性を測定し、反事実が元のサンプルに近いままであることを確認します。結果として得られる編集は、検出されたグループの違いに関連する特徴の解釈可能な証拠を提供します。 MRI では、局所的な変化はコホート間の既知の解剖学的差異と一致します。
原文 (English)
Counterfactual Explanations for Deep Two-Sample Testing
Two-sample testing is a fundamental tool for detecting distributional differences across scientific domains, but classical tests (including kernel-based tests) can be ineffective on high-dimensional structured data such as images. Recent deep two-sample tests improve sensitivity in these settings by learning informative representations, yet they provide limited insight into which data features drive rejection of the null hypothesis $H_0$. To address this issue, we propose a counterfactual explanation framework for deep two-sample testing that generates sample-level edits moving observations from a source group toward a target group while explicitly reducing the discrepancy measured by the test. Our method combines a diffusion autoencoder with a pretrained deep two-sample test model and optimizes a maximum mean discrepancy (MMD) objective in the test model's representation space to produce plausible counterfactuals. We quantify distribution-level effects through changes in the test statistic and the resulting two-sample p-values. We evaluate the method on synthetic 2D shape datasets and two MRI cohorts. Across both settings, the counterfactual transformations consistently increase p-values relative to the original samples, indicating that the edited source set becomes statistically closer to the target distribution under the test. We measure minimality using LPIPS to ensure the counterfactuals remain close to the original samples. The resulting edits provide interpretable evidence of the features associated with the detected group differences. On MRI, the localized changes are consistent with known anatomical differences between cohorts.
分散脳基盤モデルが忘れていたもの: 数十億パラメータのモデルが失敗する場合、三次統計が認知を予測する
Brain Foundation Model (BFM) は、fMRI データで事前トレーニングされた自己監視型トランスフォーマーです。私たちは、これらのモデルは各被験者の fMRI 信号から認知パフォーマンスを捕捉する必要があると仮定します。しかし、3 つの最先端の BFM とテストしたすべての読み取り値にわたって、関数接続性行列 (FC) の $\sim$80K パラメーターからの線形回帰よりも悪い認知を予測します。この差は規模が大きくなるほど拡大します。BrainLM の 650M モデルは、111M モデルよりも悪い認知を予測します。これは \textbf{分散割り当て問題} によるものだと考えられます。BFM 事前トレーニングは、fMRI を支配する分散成分を捕捉しますが、認知を予測する高次構造は捕捉しません。再構成された信号のキュムラント分析では、2 次の共分散が部分的に保存されている一方で、3 次の共歪度テンソルは大部分が破壊されていることが示されています。 BFM が失ったものを回復するために、fMRI 信号を共歪みを最もよく保存する部分空間に投影し、そこで FC を計算する線形パイプラインを設計します。これは、テストしたすべてのデータセットと分割で \textbf{生の FC とすべての事前トレーニング済み BFM を上回り}、制御された評価 \textbf{事前トレーニングや GPU を使用しない} のもとでの以前の最先端技術を上回っています。この同じ部分空間を対象とした損失を微調整することで、\textbf{BrainLM のフォワード パスの raw FC 天井を回復}します。これは、ボトルネックはアーキテクチャやモデルのサイズではなく、事前トレーニングの目的であることを示しています。
原文 (English)
The Variance Brain Foundation Models Forgot: Third-Order Statistics Predict Cognition Where Billion-Parameter Models Fail
Brain foundation models (BFMs) are self-supervised Transformers pretrained on fMRI data. We posit that these models should capture each subject's cognitive performance from their fMRI signal. Yet across three state-of-the-art BFMs and every readout we test, they predict cognition worse than a linear regression from the $\sim$80K parameters of the functional connectivity matrix (FC). The gap widens with scale: BrainLM's 650M model predicts cognition worse than its 111M. We attribute this to a \textbf{variance allocation problem}: BFM pretraining captures the variance components that dominate fMRI but not the higher-order structure that predicts cognition. Our per-cumulant analysis of the reconstructed signal shows that the second-order covariance is partially preserved, while the third-order co-skewness tensor is largely destroyed. To recover what BFMs lose, we design a linear pipeline that projects the fMRI signal into the subspace that best preserves its co-skewness and computes FC there. This \textbf{exceeds raw FC and every pretrained BFM} on every dataset and parcellation we test, outperforming prior state-of-the-art under controlled evaluation \textbf{with no pretraining and no GPU}. We \textbf{recover the raw-FC ceiling on BrainLM's forward pass} by finetuning with a loss targeted at this same subspace. This shows that the bottleneck is the pretraining objective, not the architecture or the model size.
人間の活動認識における軽量 SensorLLM のための重力認識階層ルーティング
センサーと言語のアライメントに関する最近の研究では、2 段階のフレームワークにより、ウェアラブル センサーの人間活動認識 (HAR) のセマンティック モデリング能力が向上することが示されています。SensorLLM スタイルのメソッドは、最初にモーションと言語のアライメントを実行し、次に下流のタスクに向けてモデルを微調整します。しかし、私たちの実験では、ステージ 2 のバックボーンが TinyLlama などのコンパクトなモデルに圧縮された場合に、一貫した故障モードが明らかになりました。動的アクティビティの認識は比較的強いままですが、立つ、座る、横たわるなどの動きの少ない静的なクラスの識別は大幅に低下します。この問題に対処するために、新しい大規模な事前トレーニング フレームワークではなく、すでに位置合わせされたモデルの上に構築された軽量の位置合わせ後の適応として、重力を認識した階層型ルーティング ヘッドを提案します。このメソッドは、Chronos トークナイザーの状態からのチャネルごとの平均と標準偏差を使用して、姿勢と重力方向に関連する統計的手がかりを抽出し、安定したトレーニングのための負荷分散損失とともに、ソフト ルーティングを通じて静的エキスパートと完全エキスパートを適応的に組み合わせます。 MHealth データセットでは、この設計により、最小限のパラメーター オーバーヘッドでマクロ F1 が大幅に改善され、動的アクティビティでの優れたパフォーマンスを維持しながら、ゲインは主に静的クラスに集中します。最初の arXiv 開示として、現在の論文は単一のデータセットのみに関する結果を報告しており、その目的は、中核となる手法を強調し、将来の研究におけるより広範な評価のための基礎を築くことです。
原文 (English)
Gravity-Aware Hierarchical Routing for Lightweight SensorLLM on Human Activity Recognition
Recent studies on sensor-language alignment have shown that two-stage frameworks can improve the semantic modeling ability of wearable-sensor human activity recognition (HAR), where SensorLLM-style methods first perform motion-to-language alignment and then fine-tune the model for downstream tasks. However, our experiments reveal a consistent failure mode when the Stage 2 backbone is compressed to a compact model such as TinyLlama: recognition of dynamic activities remains relatively strong, while the discrimination of low-motion static classes such as standing, sitting, and lying degrades substantially. To address this issue, we propose a gravity-aware hierarchical routing head as a lightweight post-alignment adaptation built on top of an already aligned model, rather than a new large-scale pretraining framework. The method uses the per-channel mean and std from the Chronos tokenizer state to extract statistical cues related to posture and gravity direction, and adaptively combines a static expert and a full expert through soft routing, together with a load-balancing loss for stable training. On the MHealth dataset, this design significantly improves macro-F1 with minimal parameter overhead, and the gains are concentrated mainly on static classes while preserving strong performance on dynamic activities. As a first arXiv disclosure, the current paper reports results on a single dataset only, with the goal of highlighting the core method and laying the groundwork for broader evaluation in future work.
CodegenBench: LLM はアーキテクチャ全体で効率的なコードを記述できますか?
大規模言語モデル (LLM) は、汎用プログラミングや GPU アクセラレーション環境 (PyTorch、CUDA など) のコード生成タスクで広範囲に評価されてきましたが、多様なアーキテクチャにわたる CPU 指向のハイパフォーマンス コンピューティング (HPC) における LLM の機能はまだ十分に解明されていません。このギャップを埋めるために、x86_64、Sunway、Kunpeng の 3 つの異なるハードウェア プラットフォームにわたる効率的な並列コードの生成を評価するように設計された包括的なベンチマーク スイートである CodegenBench を紹介します。私たちのベンチマークは、基本的なベースラインを確立する 106 個の標準基本線形代数サブプログラム (BLAS) ルーチンと、独自のスーパーコンピューティング アーキテクチャ (LeetSunway および LeetKunpeng) のそれぞれに適合した 20 個の特殊な計算カーネルで構成されています。私たちの広範な評価により、最先端の LLM は x86_64 のようなユビキタス アーキテクチャ向けに最適化されたコードを生成できる一方で、公開ドキュメントやトレーニング データが限られたドメイン固有のアーキテクチャでは大幅なパフォーマンスの低下を示し、クロスプラットフォームの一般化における重大な制限が浮き彫りになったことが明らかになりました。さらに、実装の長さやタスクの複雑さなど、コードの品質に影響を与える要因を分析したところ、現在の LLM は、簡潔なコード スニペットを必要とする中程度に難しい問題に対して最も効果的であることが示されています。私たちは、LLM 主導の高性能コード生成における将来の研究を促進するために、データセットと自動評価インフラストラクチャをオープンソースにしています。リソースは https://anonymous.4open.science/r/CodegenBench-EDE1/ および https://anonymous.4open.science/r/CodegenBenchDataset-2551 で利用できます。
原文 (English)
CodegenBench: Can LLMs Write Efficient Code Across Architectures?
While large language models (LLMs) have been extensively evaluated on code generation tasks for general-purpose programming and GPU-accelerated environments (e.g., PyTorch, CUDA), their capabilities in CPU-oriented high-performance computing (HPC) across diverse architectures remain underexplored. To bridge this gap, we introduce CodegenBench, a comprehensive benchmark suite designed to evaluate the generation of efficient parallel code across three distinct hardware platforms: x86_64, Sunway, and Kunpeng. Our benchmark comprises 106 standard Basic Linear Algebra Subprograms (BLAS) routines establishing a fundamental baseline, alongside 20 specialized computational kernels adapted for each of the unique supercomputing architectures (LeetSunway and LeetKunpeng). Our extensive evaluation reveals that while state-of-the-art LLMs can generate optimized code for ubiquitous architectures like x86_64, they exhibit significant performance degradation on domain-specific architectures with limited public documentation and training data, highlighting critical limitations in cross-platform generalization. Furthermore, our analysis of factors influencing code quality such as implementation length and task complexity indicates that current LLMs are most effective for moderately difficult problems requiring concise code snippets. We open-source our dataset and automated evaluation infrastructure to facilitate future research in LLM-driven high-performance code generation. The resources are available at https://anonymous.4open.science/r/CodegenBench-EDE1/ and https://anonymous.4open.science/r/CodegenBenchDataset-2551.
ソフトウェア 4.0 のバイオミメティック アーキテクチャ
主流のプログラミング パラダイムは、単一の人間の心がローカル マシンに命令を下すという過去の時代に最適化された実行モデルを継承しており、現代のシステムには歴史的なパス依存性という重荷が残されています。多次元のコネクショニスト知性をホストすることを強制されると、この脆弱なアセンブリ モデルは、確率論的および象徴的なインピーダンスの重大な不一致の重みで壊れてしまいます。最新の Software 3.x フレームワークは、ますます複雑化する外部ハーネスに大規模言語モデル (LLM) を収容することで不一致を補おうとしますが、この螺旋を描くアーキテクチャの複雑さは、静的コード アセンブリの維持コストを増大させるだけです。結果ではなく原因に対処するために、この論文ではソフトウェア 4.0、つまり人間の知能、ニューラル AI、およびネイティブに反射する記号基質のオートポイエーシス ヘテラルキーを紹介します。このパラダイムの下では、ソフトウェアは、解析される不活性なコーパスから、それ自体の構造的完全性をネイティブに検証、変更、進化させる自己調節代謝ネットワークに変換されます。このアーキテクチャを実現するプログラミング言語およびプラットフォームである Recognitive を紹介します。構造検証の負担を決定論的基板にオフロードすることにより、優れた推論時間スケーリング体制が解放されます。つまり、コネクショニスト計算が、構造制約を確率的にシミュレートするという破滅的な計算コストと財務コストではなく、完全に深い意味論的探索と仮説の横断に変換されます。従来の「ソフトウェア ファクトリー」の考え方を超えて、コネクショニストの意図を根付かせ、インテリジェンスの時代に完全に到達するために必要な理論的基礎を概説します。これは基本的なビジョンに関する文書です。型システムと操作セマンティクスの経験的評価と正式な仕様は、今後の作業の主題です。
原文 (English)
The Biomimetic Architecture of Software 4.0
Dominant programming paradigms inherit an execution model optimised for a bygone era of a single human mind instructing a local machine, leaving contemporary systems burdened with historical path dependencies. When forced to host multi-dimensional, connectionist intelligence, this brittle assembly model fractures under the weight of a profound probabilistic-symbolic impedance mismatch. While contemporary Software 3.x frameworks attempt to patch the mismatch by encasing large language models (LLMs) in increasingly complicated external harnesses, this spiralling architectural complexity only compounds the carrying cost of static code assembly. To address the cause rather than the effects, this paper introduces Software 4.0 -- an autopoietic heterarchy of human intelligence, neural AI, and natively reflective symbolic substrate. Under this paradigm, software is transformed from an inert corpus to be parsed into a self-regulating metabolic network that natively verifies, modifies, and evolves its own structural integrity. We present Recognitive, the programming language and platform that materialises this architecture. By offloading the burden of structural verification to a deterministic substrate, it unlocks a superior inference-time scaling regime -- one where connectionist compute translates entirely into deep semantic exploration and hypothesis traversal rather than the ruinous computational and financial cost of simulating structural constraints probabilistically. Moving beyond the legacy 'Software Factory' mindset, we outline the theoretical foundations required to ground connectionist intent and arrive fully in the intelligence age. This is a foundational vision paper; empirical evaluation and formal specification of the type system and operational semantics are the subject of future work.
MaskForge: 脱獄拡散のための構造認識型適応型攻撃 大規模言語モデル
拡散大規模言語モデル (dLLM) は、双方向コンテキストの下で部分的にマスクされたシーケンスを繰り返しノイズ除去することでテキストを生成し、自己回帰 LLM とは異なる安全面を公開します。マスク トークンはネイティブ入力であり、トークンは位置ではなく信頼度によってコミットされるため、監視対象のプレフィックスの埋め込みや外部を通じて有害なコンテンツが誘発される可能性があります。既存のジェイルブレイクは、このネイティブの埋め込み機能を見逃しているか、構造的な適応や蓄積された攻撃経験がほとんどなく、目標全体に均一に適用される多様性の低いマスクを含むテンプレートに依存しています。私たちは、増大する構造パターンのライブラリに対する最適化された検索として dLLM レッドチームをキャストする、完全にブラックボックスの適応型攻撃である MaskForge を提案します。 MaskForge は、成功した試行を再利用可能なスキーマに抽象化し、UCB バンディットで目標と互換性のあるパターンを選択し、現在のライブラリが失敗した場合にスコアラーに基づくフォールバックを呼び出します。成功した試行はパターン ライブラリに抽出され、目標全体にわたって経験を蓄積できるようになります。 5 つの公開 dLLM と 3 つのベンチマーク全体で、MaskForge は 79.3% の平均攻撃成功率を達成しており、最も強力な競合 dLLM ベースラインと比べて相対的に 17.6% 向上しています。成熟したパターン ライブラリは、更新なしで AdvBench にさらに転送され、88.2% の攻撃成功率と、最も強力な競合ベースラインと比較して 67% の相対的な改善を達成しました。
原文 (English)
MaskForge: Structure-Aware Adaptive Attacks for Jailbreaking Diffusion Large Language Models
Diffusion large language models (dLLMs) generate text by iteratively denoising partially masked sequences under bidirectional context, exposing a safety surface distinct from autoregressive LLMs. Because mask tokens are native inputs and tokens are committed by confidence rather than position, harmful content can be induced through infilling and outside the monitored prefix. Existing jailbreaks either miss this native infill capability or rely on low-diversity mask-bearing templates applied uniformly across goals, with little structural adaptation or accumulated attack experience. We propose MaskForge, a fully black-box adaptive attack that casts dLLM red-teaming as optimized search over a growing library of structural patterns. MaskForge abstracts successful attempts into reusable schemas, selects goal-compatible patterns with a UCB bandit, and invokes a scorer-guided fallback when the current library fails. Successful attempts are distilled back into the pattern library, enabling experience to accumulate across goals. Across five public dLLMs and three benchmarks, MaskForge achieves an average attack success rate of 79.3%, a 17.6% relative improvement over the strongest competing dLLM baseline. The matured pattern library further transfers to AdvBench without any updates, achieving a 88.2% attack success rate and a 67% relative improvement over the strongest competing baseline.
立場: 導入された強化学習は継続的であるべきです
強化学習 (RL) はますます注目を集めており、実世界のユースケースで採用されています。これらのシステムのほとんどは、訓練してから修正するというパラダイムに従っており、訓練されたエージェントは、パフォーマンスが低下して再訓練が必要になるまで、世界と対話しながら学習しません。この意見書では、最適化ができないにもかかわらず評価報酬シグナルを受け取るエージェントをデプロイすることは、本質的に継続的な RL 問題であると主張します。私たちは、終わりのない学習を必要とする展開後の非定常性の 4 つの原因を特定し、最適に展開されたエージェントが適応をやめない理由を強調します。私たちは現実世界での継続的な RL の成功例を分析し、現在のトレーニングして修正するパラダイムから脱却するための利点と対策をコミュニティに提示します。
原文 (English)
Position: Deployed Reinforcement Learning should be Continual
Reinforcement Learning (RL) has received increasing attention and adoption in real-world use cases. Most of these systems follow a train-then-fix paradigm, where trained agents do not learn while interacting with the world until performance degrades and retraining becomes necessary. In this position paper, we argue that deploying an agent that is incapable of optimality, but receives an evaluative reward signal, is inherently a continual RL problem. We identify four sources of non-stationarity after deployment that necessitate never-ending learning, and highlight why the best deployed agents never stop adapting. We analyze successful examples of continual RL in the real world, and present the community with the advantages and measures to move away from the current train-then-fix paradigm.
トランスフォーマーには 3 つの投影が必要ですか? QKV バリアントの体系的な研究
トランスフォーマーは、クエリ、キー、値 (QKV) アテンションの定式化が中心的な役割を果たし、さまざまな AI タスクの標準ソリューションとなっています。しかし、これら 3 つの予測の個々の寄与と、一部を省略した場合の影響については、依然として十分に理解されていません。 3 つの射影共有制約を系統的に評価します。a) Q-K=V (共有キーと値)、b) Q=K-V (共有クエリキー)、c) Q=K=V (単一射影)。最後の 2 つのバリアントは、対称的なアテンション マップを生成します。これに対処するために、2D 位置エンコーディングによる非対称の注意も調査します。合成タスク、ビジョン (MNIST、CIFAR、TinyImageNet、異常)、言語モデリング (10B トークン上の 300M および 1.2B パラメーター モデル) にわたる実験を通じて、当社のトランスフォーマーは QKV トランスフォーマーと同等か、場合によってはそれよりも優れたパフォーマンスを発揮することがわかりました。言語モデリングでは、Q-K=V 射影共有により、わずか 3.1% のパープレキシティ低下で 50% の KV キャッシュ削減が達成されます。重要なのは、射影共有はヘッド共有 (GQA/MQA) を補完するものです。Q-K=V と GQA-4 を組み合わせると 87.5% のキャッシュ削減が得られ、Q-K=V + MQA では 96.9% が達成され、実用的なオンデバイス推論が可能になります。キーと値は同様の表現空間を占有することができ、注意は低ランク領域で動作するため、Q-K=V は品質を維持しますが、Q=K-V は注意の方向性を壊すことを示します。私たちの結果は、投影共有を、直接的で定量化可能な推論メモリの利点を備えた注意力の結びつきの未解明な例として体系的に特徴付けており、特にエッジ展開に価値があります。コードは https://github.com/anusamadan02/Do-Transformers-Need-3-Projections で公開されています。
原文 (English)
Do Transformers Need Three Projections? Systematic Study of QKV Variants
Transformers have become the standard solution for various AI tasks, with the query, key, and value (QKV) attention formulation playing a central role. However, the individual contribution of these three projections and the impact of omitting some remain poorly understood. We systematically evaluate three projection sharing constraints: a) Q-K=V (shared key-value), b) Q=K-V (shared query-key), and c) Q=K=V (single projection). The last two variants produce symmetric attention maps; to address this, we also explore asymmetric attention via 2D positional encodings. Through experiments spanning synthetic tasks, vision (MNIST, CIFAR, TinyImageNet, anomaly), and language modeling (300M and 1.2B parameter models on 10B tokens), we discovered that our transformers perform on par or occasionally better than the QKV transformer. In language modeling, Q-K=V projection sharing achieves 50% KV cache reduction with only 3.1% perplexity degradation. Crucially, projection sharing is complementary to head sharing (GQA/MQA): combining Q-K=V with GQA-4 yields 87.5% cache reduction, while Q-K=V + MQA achieves 96.9%, enabling practical on-device inference. We show that Q-K=V preserves quality because keys and values can occupy similar representational spaces and attention operates in a low-rank regime, whereas Q=K-V breaks attention directionality. Our results systematically characterize projection sharing as an underexplored instance of weight tying in attention, with direct, quantifiable inference memory benefits, particularly valuable for edge deployment. The code is publicly available at https://github.com/anushamadan02/Do-Transformers-Need-3-Projections
予測できない安全性: ドメイン依存のコンプライアンスとオープンウェイト LLM の透明性ギャップ
我々は、オープンウェイト LLM におけるドメイン依存の安全行動の体系的な研究を紹介します。7 つの倫理ドメインにわたる 7 つの標準化された実験で、デュアルジャッジ検証による 4,200 件のインタラクションで 5 つのモデル (12B ~ 70B) をテストしました。二重条件の方法論を使用し、各シナリオを分析フレーム (危害の特定) と運用フレーム (危害の実行を支援) の両方でテストしたところ、コンプライアンス率は 14.7% (人身売買) から 85.7% (監視設計) まで変化しており、重複しないクラスター ブートストラップの 95% CI では 71 パーセント ポイントの範囲であることがわかりました。信頼できる展開には予測可能な安全動作が必要ですが、コンプライアンスは状況に大きく依存していることがわかりました。同じモデル (Mistral Nemo 12B) はリクエストの 100% で監視設計を提供しますが、トラフィックの支援は 26.7% のみです。この予測不可能性は、導入担当者にとって不透明です。技術的なフレーミング バイパスでは、拒否しきい値が変化したという外部からの信号なしに、エンジニアリング上の問題として再構成された有害な要求が安全トレーニングを無効にします。ドメイン内の異質性は 84.4pp に達しており、ドメイン レベルでも安全動作を予測できないことを意味します。 GitHub Copilot CLI デプロイ済み製品サーフェスを介してアクセスされた 5 つのフロンティア クローズド モデル (GPT-4.1/5.2、Claude Haiku/Sonnet/Opus 4.x、n=4,163 回答) での複製では、同じドメイン階層化が再現され、絶対レベルで減衰されていますが形状は同一であり、2 つの低コード化ドメイン (科学詐欺、監視) が再び最も寛容です。これらの結果は、現在の安全メカニズムには、信頼できる AI の導入に必要な透明性と一貫性が欠けていることを示しています。
原文 (English)
Unpredictable Safety: Domain-Dependent Compliance and the Transparency Gap in Open-Weight LLMs
We present a systematic study of domain-dependent safety behavior in open-weight LLMs: 7 standardized experiments across 7 ethical domains, testing 5 models (12B--70B) in 4,200 interactions with dual-judge validation. Using a dual-condition methodology, each scenario tested in both an analytical framing (identify the harm) and an operational framing (help commit the harm), we find compliance rates vary from 14.7% (human trafficking) to 85.7% (surveillance design), a 71-percentage-point span with non-overlapping cluster-bootstrapped 95% CIs. Trustworthy deployment requires predictable safety behavior, yet we find compliance is highly context-dependent: the same model (Mistral Nemo 12B) provides surveillance designs in 100% of requests but assists with trafficking in only 26.7%. This unpredictability is opaque to deployers: the technical framing bypass, where harmful requests reframed as engineering problems override safety training without any external signal that refusal thresholds have shifted. Within-domain heterogeneity reaches 84.4pp, meaning safety behavior cannot be predicted even at the domain level. A replication on five frontier closed models (GPT-4.1/5.2, Claude Haiku/Sonnet/Opus 4.x; n=4,163 responses) accessed via the GitHub Copilot CLI deployed-product surface reproduces the same domain stratification, attenuated in absolute level but identical in shape, with the two low-codification domains (science fraud, surveillance) again the most permissive. These results show that current safety mechanisms lack the transparency and consistency required for trustworthy AI deployment.
静的な事前確率を超えて: 大規模なアリのコロニー最適化のための動的ニューラル ガイダンス
神経誘導型アリコロニー最適化 (ACO) は、トレーニングと推論の根本的な不整合に悩まされています。ポリシーは通常、静的な事前分布 (ヒートマップなど) を生成するようにトレーニングされますが、反復的な長期にわたる検索プロセスをガイドするために展開されます。本稿では、フェロモン分布と既存のソリューションを定期的に観察することで動的神経誘導を実現する新しいフレームワークである DyNACO を紹介します。 DyNACO を大規模に扱いやすくするために、私たちはこのポリシーを摂動ベースの ACO バックエンドと、有効性と安定したクレジット割り当てを共同で保証する範囲制限付きの改良メカニズムと組み合わせます。 TSP では、DyNACO は 100,000 ノード インスタンスにスケールし、ニューラル ベースラインを上回るパフォーマンスを示し、多くの場合、ガイドなしソルバーと比較して総実行時間を短縮します。キャパシティを意識したバックエンドを介して DyNACO を CVRP に拡張し、1% 未満のニューラル オーバーヘッドでガイドなしのベースラインを一貫して改善します。さらに、モデルの一般化機能を検証し、動的ガイダンスが静的事前ガイダンスよりも優れている理由を解明する詳細な分析を提供します。私たちの研究は、学習誘導型の最適化におけるニューラル トレーニングと反復検索ダイナミクスを調整する必要性を強調しています。コードは https://github.com/shoraaa/DyNACO で入手できます。
原文 (English)
Beyond Static Priors: Dynamic Neural Guidance for Large-Scale Ant Colony Optimization
Neural-guided Ant Colony Optimization (ACO) suffers from a fundamental training-inference misalignment: policies are typically trained to generate static priors (e.g., heatmaps), yet deployed to guide iterative, long-horizon search processes. In this paper, we present DyNACO, a novel framework that achieves dynamic neural guidance by periodically observing the pheromone distribution and the incumbent solution. To make DyNACO tractable at scale, we pair the policy with a perturbation-based ACO backend and a scope-restricted refinement mechanism that jointly ensure efficacy and stable credit assignment. On TSP, DyNACO scales to 100,000-node instances and outperforms neural baselines while often reducing total runtime compared to the unguided solver. We extend DyNACO to CVRP via a capacity-aware backend, consistently improving the unguided baseline with less than 1% neural overhead. We further provide in-depth analysis validating the model's generalization capabilities and elucidating why dynamic guidance outperforms static priors. Our work underscores the necessity of aligning neural training with iterative search dynamics in learning-guided optimization. The code is available at https://github.com/shoraaa/DyNACO.
EEGから音楽への再構成のためのチャネル指向の設計
ブレイン コンピューター インターフェイスは、神経信号から自然な刺激を解読することを目的としていますが、これまでの進歩のほとんどは視覚と言語に焦点を当てています。この記事では、信号が弱く、分散しており、ノイズやチャネル変動の影響を非常に受けやすい、より挑戦的ですがあまり研究されていない設定である脳波から音楽への再構成について研究します。私たちの中心的な発見は、初期のチャネルミキシングが弱いが識別可能なEEG信号を破壊するということです。これに対処するために、3 つの主要なコンポーネントを備えたチャネル指向の設計を提案します。具体的には、チャネルごとのトークン化は、各電極を明示的なトークンとして扱い、空間的に局所化された神経証拠を保持します。チャネルごとのマルチビュー自己蒸留は、時間的クロップとランダムなチャネル サブセット全体で一貫性を強制して、ロバストで分散された表現を学習します。また、チャネルごとのデータ拡張では、構造化チャネル ドロップアウトを導入して、ノイズ、アーティファクト、電極の欠落に対する不変性を改善します。これらのコンポーネントを組み合わせることで、弱いながらも有益な信号がチャネル間で保存され、セマンティックな音楽表現空間への安定した調整が可能になります。このチャネル指向の設計を、EEG から音楽への再構成のためのエンコーディング、アライメント、デコーディングのパイプライン内に統合します。理論的には、チャネルレベルの構造を保存することがアライメントの改善につながる場合を特徴付けます。経験的に、さまざまな最先端のベースラインと比較し、一貫した大幅なパフォーマンスの向上を実証しています。
原文 (English)
Channel-Oriented Design for EEG-to-Music Reconstruction
Brain-computer interfaces aim to decode naturalistic stimuli from neural signals, yet most progress to date has focused on vision and language. In this article, we study a more challenging but far less explored setting, EEG-to-music reconstruction, where signals are weak, distributed, and highly susceptible to noise and channel variability. Our central finding is that early channel mixing destroys weak but discriminative EEG signals. To address this, we propose a channel-oriented design with three key components. Specifically, channel-wise tokenization treats each electrode as an explicit token to retain spatially localized neural evidence, channel-wise multi-view self-distillation enforces consistency across temporal crops and random channel subsets to learn robust and distributed representations, and channel-wise data augmentation introduces structured channel dropout to improve invariance to noise, artifacts, and missing electrodes. Together, these components preserve weak yet informative signals across channels and enable stable alignment to a semantic music representation space. We integrate this channel-oriented design within an encoding-alignment-decoding pipeline for EEG-to-music reconstruction. Theoretically, we characterize when preserving channel-level structure leads to improved alignment. Empirically, we compare with a range of state-of-the-art baselines and demonstrate consistent and significant performance gains.
教師あり学習におけるベイズ十分表現
表現学習は、予測に関連する入力内の情報を保存するものとしてよく説明されます。この研究では、固定された教師あり決定問題に対する関連性が何を意味するかを問います。予測ヘッドがそれを使用してベイズ最適アクション ルールを実装できる場合、その表現は結合分布と損失に対して十分なベイズであると定義されます。これにより、ターゲット情報が損失に依存するようになります。ほぼ確実に一意のベイズ アクションの場合、関連するオブジェクトはベイズ商であり、同じベイズ最適アクションを必要とする入力を識別します。この商を洗練する場合は表現で十分であり、情報的に同等である場合はベイズ最小表現で十分です。このフレームワークは自然に特性の導出につながります。ゼロ 1 損失にはベイズ クラスが必要で、二乗損失には条件付き平均が必要です。ブライアー損失にはバイナリ予測の条件付き確率が必要です。また、対数損失または厳密に適切なスコアリングによって予測分布が決まります。制御された有限実験、学習されたニューラル ボトルネック実験、および実データの iNaturalist 分類学的洗練実験は、十分性、最小限性、および保持される不要な情報の区別を示します。固定教師付き問題の場合、分布と損失によってベイズ アクションが決まり、ベイズ アクションによって商が決まり、商によってベイズ最適予測に必要な最小限の情報が決まります。
原文 (English)
Bayes-Sufficient Representations in Supervised Learning
Representation learning is often described as preserving the information in an input that is relevant for prediction. This work asks what relevance means for a fixed supervised decision problem. A representation is defined to be Bayes-sufficient for a joint distribution and loss if some prediction head can use it to implement a Bayes-optimal action rule. This makes the target information loss-dependent. In the almost-surely unique Bayes-action case, the relevant object is a Bayes quotient, which identifies inputs that require the same Bayes-optimal action. A representation is sufficient when it refines this quotient, and Bayes-minimal when it is informationally equivalent to it. The framework connects naturally to property elicitation: zero-one loss requires the Bayes class, squared loss the conditional mean, Brier loss the conditional probability in binary prediction, and log loss or strictly proper scoring rules the predictive distribution. Controlled finite experiments, learned neural bottleneck experiments, and a real-data iNaturalist taxonomic refinement experiment illustrate the distinction between sufficiency, minimality, and retained non-required information. For a fixed supervised problem, the distribution and the loss determine the Bayes action, the Bayes action determines the quotient, and the quotient determines the minimal information required for Bayes-optimal prediction.
現場に飛び込む: フォーカス プランの生成を通じて、視覚と言語の意思決定における知覚のボトルネックを打破する
ロボット操作やナビゲーションなどの身体化された視覚言語による意思決定タスクでは、視覚言語モデルおよび視覚言語アクション モデル (VLM および VLA) は、さまざまな利点を持つ強力なツールです。VLM は長期計画に優れ、VLA は事後制御に優れています。ただし、モデルのパフォーマンスは、同じ知覚のボトルネックによって制限されます。モデルがタスクに関連するオブジェクトと気を散らすものとを区別できないために幻覚が発生します。原則として、無関係なものを除外しながら、正確に識別して重要なオブジェクトに焦点を当てることが、この制限を打ち破る鍵となります。簡単な解決策は、重要なオブジェクトに直接注目するというワンステップの焦点です。ただし、効果的に焦点を合わせるには本質的にシーンを深く理解する必要があるため、このアプローチは効果的ではないことがわかります。この目的を達成するために、我々は、VLM の長期計画能力を活用した、粗いから細かいまでのフォーカス プラン生成方法である SceneDiver を提案します。この方法では、最初に全体的なシーン グラフを構築して初期理解を確立し、次に認識、理解、分析の反復サイクルを通じてタスクをより単純なサブ問題に徐々に分解します。反応的な制御を可能にするために、意図的なフォーカス機能を VLA に抽出するための軽量アダプターも設計しました。標準の組み込み AI ベンチマークでの評価により、私たちの方法は、高速実行を必要とするタスクの計算効率を維持しながら、VLM と VLA の両方で幻視を大幅に軽減することが確認されています。コードとデータは https://future-item.github.io/SceneDiver でリリースされています。
原文 (English)
Dive into the Scene: Breaking the Perceptual Bottleneck in Vision-Language Decision Making via Focus Plan Generation
In embodied vision-language decision making tasks such as robotic manipulation and navigation, Vision-Language and Vision-Language-Action Models (VLMs & VLAs) are powerful tools with different benefits: VLMs are better at long-term planning, while VLAs are better at reactive control. However, their performance is limited by the same perceptual bottleneck: visual hallucinations arise due to the models' inability to distinguish task-relevant objects from distractors. In principle, accurate identification and focus on critical objects while filtering out irrelevant ones is the key to break this limitation. A straightforward solution is one-step focus: directly attending to essential objects. However, this approach proves ineffective because effective focus inherently requires deep scene understanding. To this end, we propose SceneDiver, a coarse-to-fine focus plan generation method for VLMs leveraging their long-term planning abilities, that first constructs a holistic scene graph to establish initial comprehension, then progressively decomposes the task into simpler sub-problems through an iterative cycle of recognition, understanding, and analysis. To enable reactive control, we also design a lightweight adapter for distilling the deliberate focus ability into VLAs. Evaluations on standard embodied AI benchmarks confirm that our method substantially reduces visual hallucinations for both VLMs and VLAs, while preserving computational efficiency in tasks requiring fast execution. Our code and data are released at: https://future-item.github.io/SceneDiver.
ゲートデルタネットワークの大規模な機能学習のロックを解除する
大規模言語モデルのトレーニングとスケーリングには膨大な計算リソースが必要であり、効率的な二次二次アーキテクチャと原則に基づいたハイパーパラメータ調整方法の両方が動機付けられます。 Maximal Update Parametrization ($\mu$P) により、標準の Transformer のゼロショット ハイパーパラメータ転送が可能になりましたが、線形モデル、特に構造化された状態遷移や複雑なアーキテクチャを持つモデルへの拡張は、ほとんど未開発のままです。フォワード パス、ゲート メカニズム、およびリカレント ステート ダイナミクスを通じて座標サイズの推定値を厳密に伝播することにより、ゲート デルタ ネットワークのスケーリング ルールを導き出します。言語モデルの事前トレーニングに関する実験により、私たちの構成では AdamW と SGD の両方のモデル幅にわたって安定した学習率の移行が可能である一方、標準のパラメータ化では移行できないことが確認され、分析の正確さと実用性が検証されました。
原文 (English)
Unlocking Feature Learning in Gated Delta Networks at Scale
Training and scaling Large Language Models demand enormous computational resources, motivating both efficient sub-quadratic architectures and principled hyperparameter tuning methods. While the Maximal Update Parametrization ($\mu$P) has enabled zero-shot hyperparameter transfer for standard Transformers, its extension to linear models, particularly those with structured state transitions and complicated architectures, remains largely unexplored. By rigorously propagating coordinate-size estimates through the forward pass, gating mechanisms, and recurrent state dynamics, we derive the scaling rules for Gated Delta Network. Experiments on language-model pre-training confirm that our configurations enable stable learning-rate transfer across model widths under both AdamW and SGD, whereas standard parametrization fails to transfer, validating the correctness and practical utility of our analysis.
LiftQuant: 次元リフティングと投影による連続ビット幅 LLM
既存の量子化手法は基本的に、厳格な整数ベースのビット幅 (例: 2、3 ビット) によって制限されており、その結果、大規模言語モデルを特定のメモリ バジェットに最適に適合させることができない「デプロイメント ギャップ」が生じます。このギャップを埋めるために、真のパレート最適デプロイメントのための継続的なビット幅制御を可能にする新しいフレームワークである LiftQuant を紹介します。中心となるイノベーションは、「リフト ゼン プロジェクト」メカニズムです。高次元の「リフトされた」空間から単純な 1 ビット格子を投影することで、低次元の重みベクトルを近似します。重要なことに、有効なビット幅は、元の次元に対するリフト次元の比率によって単純に決定され、次元が柔軟な構造パラメータであるため、ビット幅を準連続的に調整できます。この投影は、構造化されているが不均一なコードブックを生成し、ベクトル量子化 (VQ) の表現力を捉えます。 VQ、LiftQuant のデコード パスは線形変換と 1 ビットの均一量子化器のみに依存しており、ハードウェアに優しい性質を維持しています。LiftQuant を使用すると、70B LLM を 24GB GPU に正確に適合させることができ、そのパフォーマンスは同じデバイスに搭載されている最先端の 2 ビット モデルを大幅に上回ります。 https://github.com/Heliulu/LiftQuant。
原文 (English)
LiftQuant: Continuous Bit-Width LLM via Dimensional Lifting and Projection
Existing quantization methods are fundamentally limited by rigid, integer-based bit-widths (e.g., 2, 3-bit), resulting in a ``deployment gap" where Large Language Models cannot be optimally fitted to specific memory budgets. To bridge this gap, we introduce LiftQuant, a novel framework that enables continuous bit-width control for true Pareto-optimal deployment. The core innovation is a ``lift-then-project" mechanism which approximates low-dimensional weight vectors by projecting a simple 1-bit lattice from a higher-dimensional ``lifted" space. Crucially, the effective bit-width is determined simply by the ratio of the lifted dimension to the original dimension, which allows the bit-width to be tuned quasi-continuous as the dimension is a flexible structural parameter. This projection generates a structured yet non-uniform codebook, capturing the expressive power of Vector Quantization (VQ). While beneficial over VQ, LiftQuant's decoding path relies solely on linear transformations and 1-bit uniform quantizers, retaining hardware-friendly nature. This flexibility is transformative: LiftQuant enables a 70B LLM to be compressed to 2.4 bits to precisely fit a 24GB GPU, where its performance significantly surpasses state-of-the-art 2-bit models fitted on the same device. Our code and ckpt is available at https://github.com/Heliulu/LiftQuant.
RUBAS: エージェントの安全のためのルーブリックベースの強化学習
LLM がツール対応エージェントに進化すると、単純なテキスト生成ではなく現実世界の実行に関連した新しいクラスの安全性の課題が生じます。既存の調整方法は、粗い拒否信号や静的な監視に依存することが多く、さまざまなエージェントのリスクにわたって安全性と有用なツールの実行のバランスをとることが困難です。エージェントの安全性のためのルーブリックベースの強化学習フレームワークである RUBAS を紹介します。 RUBAS は、エージェントの動作をツール使用の安全性、引数の安全性、応答の安全性、有用性の 4 つの次元に分解します。これらの構造化されたルーブリックは、エージェントの完全な軌跡にわたってきめ細かく解釈可能な報酬を提供し、タスクの完了を維持しながら安全なツールの使用を最適化する強化学習を可能にします。複数のエージェントの安全性ベンチマークとモデルにわたる広範な実験により、RUBAS が標準的なアライメントベースラインよりも安全性を向上させ、ツールに基づく幻覚を軽減し、競争力のある実用性を維持することが示されています。私たちの結果は、多次元ルーブリック報酬が、安全性が重要なツール使用環境において LLM エージェントを調整するための効果的なトレーニング信号を提供することを示唆しています。
原文 (English)
RUBAS: Rubric-Based Reinforcement Learning for Agent Safety
The evolution of LLMs into tool-enabled agents creates a new class of safety challenges associated with real-world execution rather than simple text generation. Existing alignment methods often rely on coarse refusal signals or static supervision, making it difficult to balance safety with useful tool execution across diverse agentic risks. We introduce RUBAS, a rubric-based reinforcement learning framework for agent safety. RUBAS decomposes agent behavior into four dimensions: tool-use safety, argument safety, response safety, and helpfulness. These structured rubrics provide fine-grained and interpretable rewards over complete agent trajectories, enabling reinforcement learning to optimize safe tool use while preserving task completion. Extensive experiments across multiple agent safety benchmarks and models show that RUBAS improves safety over standard alignment baselines, reduces tool-grounded hallucinations, and maintains competitive utility. Our results suggest that multi-dimensional rubric rewards provide an effective training signal for aligning LLM agents in safety-critical tool-use settings.
ブールタスク代数におけるタスク構成の目標設定の特徴付け
ブール タスク代数 (BTA) は、目標達成タスクにブール演算を装備することにより、強化学習におけるゼロショット タスク構成のための原則的なフレームワークを提供します。構造的な仮定を再考し、最適な拡張 Q 値関数の空間における崩壊を定式化します。決定論的 MDP では、そのような関数はすべて普遍的で空のタスクによって完全に決定されます。これにより、元の BTA 定式化で提案された基本タスクの対数セットが冗長になります。この観察に基づいて、目標セットに対して論理演算を実行し、普遍的および空の値関数からスライスを選択することによって合成された値関数を再構築する、目標セットベースの合成方法を導入します。これにより、ポリシーのパフォーマンスを維持しながら、標準 BTA の学習コストが削減され、BTA とスキル マシンの両方の作成時間が短縮されます。表形式、視覚的、関数近似、および連続制御の各ドメインにわたる実験では、追加の基本タスクを学習してもパフォーマンスが向上しないことが示されています。最後に、確率的設定を研究し、この崩壊が成り立つ必要はないこと、つまり、最適な構成には、目標の数において指数関数的に多くの政策を考慮する必要がある可能性があることを示す反例を提供します。コードは https://github.com/EduardoTerres/bta_paper で入手できます。
原文 (English)
A Goal-Set Characterization of Task Composition in the Boolean Task Algebra
The Boolean Task Algebra (BTA) provides a principled framework for zero-shot task composition in reinforcement learning by equipping goal-reaching tasks with Boolean operations. We revisit its structural assumptions and formalize a collapse in the space of optimal extended Q-value functions: in deterministic MDPs, every such function is fully determined by the universal and empty tasks. This makes the logarithmic set of base tasks proposed in the original BTA formulation redundant. Building on this observation, we introduce a goal-set-based composition method that performs logical operations on goal sets and reconstructs composed value functions by selecting slices from the universal and empty value functions. This reduces learning costs for standard BTA and reduces composition time for both BTA and Skill Machines, while preserving policy performance. Experiments across tabular, visual, function-approximation, and continuous-control domains show that learning additional base tasks does not yield better performance. Finally, we study the stochastic setting and provide a counterexample showing that this collapse need not hold, that is, optimal composition may require accounting for exponentially many policies in the number of goals. Code is available at https://github.com/EduardoTerres/bta_paper.
目に見えない宝くじ: LLM コード生成におけるアルゴリズムの選択を微妙な手がかりがどのように左右するか
大規模言語モデル (LLM) は、多くの場合、複数の有効なアルゴリズム ソリューションを含むタスク向けに、実質的な運用コードを生成するようになりました。タスク仕様外の文脈上の単語やメタデータを意味する付随的なプロンプト キューは、すべての出力が同じテストに合格した場合でも、モデルが選択するアルゴリズムを制御できます。即時感度は、出力品質を向上させるツールとしてよく研究されています。ここで、出力ポリシーとは、固定の正確性の下でのアルゴリズムの選択を意味します。私たちは、アルゴリズムステアリングをアルゴリズムファミリー分布におけるキュー誘発のシフトとして定義し、11のタスク、19のキュータイプ(18のチャネルと、タイポグラフィーと句読点を変更しながら意味を保持するメモ化の意味対表面のアブレーション)、および15のモデル構成にわたって46,535の制御された実験を実行しました。我々は、レート制限などの応用タスクを含む、キューのセマンティクスとほぼ一致する、アルゴリズム ファミリの分布における大きく系統的な変化 (最大 100 pp) を発見しました。アルゴリズムの直接命名は、私たちがテストした最も信頼性の高い軽減策です。したがって、偶然のコンテキストによって、パフォーマンス、セキュリティ、および保守性をめぐる「目に見えない宝くじ」が作成されます。
原文 (English)
The Invisible Lottery: How Subtle Cues Steer Algorithm Choice in LLM Code Generation
Large language models (LLMs) now generate substantial production code, often for tasks with multiple valid algorithmic solutions. Incidental prompt cues, meaning contextual words or metadata outside the task specification, can steer which algorithm the model selects, even when all outputs pass the same tests. Prompt sensitivity is well studied as a tool to improve output quality. Here, output policy means algorithm choice under fixed correctness. We define algorithm steering as cue-induced shifts in algorithm-family distributions and run 46,535 controlled experiments across 11 tasks, 19 cue types (18 channels plus a memoization semantic-vs-surface ablation that preserves meaning while changing typography and punctuation), and 15 model configurations. We find large, systematic shifts in algorithm-family distributions (up to 100 pp), largely consistent with cue semantics, including in applied tasks such as rate limiting. Direct algorithm naming is the most reliable mitigation we tested. Accidental context therefore creates an "invisible lottery" over performance, security, and maintainability.
ミュオンのスペクトルスケーリングの法則
直交正規化更新ルールは、大規模な言語モデルをトレーニングするためのオプティマイザーの主要な選択肢として急速に普及しており、最近のオープンソースの最先端モデルでは Muon が採用されています。これらの更新を扱いやすくするために、Muon は Newton-Schulz (NS) 反復を使用して正規直交化を実行します。 NS は近似値にすぎないため、小さな特異値を持つ方向は直交正規化できません。 Muon では、NS は各ステップで運動量行列に適用されますが、これらの運動量行列の特異値スペクトルがトレーニング中にどのように動作するか、またはその動作がモデル サイズに応じてどのように変化するかについてはほとんどわかっていません。我々は、この問題に関する最初の体系的な研究を紹介します。 77M から 2.8B パラメーターの範囲のモデルで層全体の運動量バッファーの特異値分位数を追跡すると、一貫した状況が観察されます。短いバーンインの後、分位数は層のタイプとモデル サイズによって決定される値で安定します。これらの安定化値は、層に依存する指数を備えた、モデル サイズにおける非常にきれいなべき乗則に従います。中深度から後期までの層は、モデル サイズ $M$ (約 $M^{-0.25}$) で非常に穏やかにスケーリングするため、学術規模で使用される標準の 5 ステップ NS 構成は、より大きなスケールでも引き続き直交正規化します。ただし、後期層の一部はより積極的にスケールし ($M^{-0.96}$ まで)、より多くの NS 反復またはより適切に調整された係数を使用しない限り、フロンティア スケールで NS 失敗領域に陥ります。 NS の反復は大規模になると計算コストが高くなります。私たちの法律は、実務者に、重要な方向を直交正規化する最小の NS 構成を選択するための原則に基づいたレイヤー認識のレシピを提供します。つまり、更新の品質を犠牲にすることなく不必要な計算を回避します。
原文 (English)
Spectral Scaling Laws of Muon
Orthonormalized update rules have rapidly become a leading choice of optimizer for training large language models, with recent open-source state-of-the-art models adopting Muon. To keep these updates tractable, Muon performs the orthonormalization with the Newton--Schulz (NS) iteration. Since NS is only approximate, directions with small singular values fail to be orthonormalized. In Muon, NS is applied to the momentum matrix at every step, yet little is known about how the singular value spectrum of these momentum matrices behaves during training, or how that behavior changes with model size. We present the first systematic study of this question. Tracking singular value quantiles of the momentum buffer across layers in models ranging from 77M to 2.8B parameters, we observe a consistent picture: after a short burn-in, the quantiles stabilize at a value determined by the layer type and model size. These stabilization values follow remarkably clean power laws in model size, with layer-dependent exponents. Layers up to mid-late depth scale very mildly with model size $M$ (around $M^{-0.25}$), so the standard 5-step NS configuration used at academic scale will continue to orthonormalize them at much larger scales. Some of the late layers, however, scale much more aggressively (up to $M^{-0.96}$) and will fall into the NS failure regime at frontier scale unless one uses more NS iterations or better-tuned coefficients. NS iterations are computationally expensive at scale; our laws give practitioners a principled, layer-aware recipe for choosing the minimum NS configuration that still orthonormalizes the directions that matter -- avoiding unnecessary computation without sacrificing update quality.
アーキテクチャと量子化の選択を組み合わせて最適化する LLM 圧縮
大規模言語モデル (LLM) のデプロイは、大量のメモリと計算要件があるため、困難です。一部の方法では、小規模または極小の言語モデルを最初から開発することでこの問題に対処しますが、これらのアプローチでは広範な GPU トレーニングが必要です。エッジデバイス用に事前トレーニングされた LLM を圧縮することは、魅力的な代替手段を提供します。プルーニングと量子化を超えて、ニューラル アーキテクチャ検索 (NAS) は効果的な圧縮を可能にしますが、従来の NAS アプローチでは多くの場合、検索スペースが制限され、アーキテクチャが量子化から分離されていました。私たちは、空間全体を探索し、LLM の線形層の混合精度量子化と並行してアーキテクチャ構成を共同で最適化する微分可能な NAS フレームワークを導入します。実験では、精度とレイテンシの優れたトレードオフが実証されています。当社のモデルは、同等の精度で逐次 NAS を経て量子化するベースラインよりも最大 1.4 倍高速な推論、または同等のレイテンシで 7 つの推論タスク全体で最大 6% 高い平均精度を達成します。
原文 (English)
LLM Compression with Jointly Optimizing Architectural and Quantization choices
Deploying large language models (LLMs) is challenging due to their significant memory and computational requirements. While some methods address this by developing small or tiny language models from scratch, these approaches demand extensive GPU training. Compressing pre-trained LLMs for edge devices offers a compelling alternative. Beyond pruning and quantization, Neural Architecture Search (NAS) enables effective compression, yet prior NAS approaches often limit the search space and decouple architecture from quantization. We introduce a differentiable NAS framework that explores the entire space and jointly optimizes architectural configurations alongside mixed-precision quantization for linear layers of LLMs. Experiments demonstrate superior accuracy-latency trade-offs: our models achieve up to 1.4x faster inference than sequential NAS-then-quantization baselines at comparable accuracy, or up to 6% higher average accuracy across seven reasoning tasks at equivalent latency.
知っておくべきこと: プライバシーを意識した LLM 委任のためのコンテキスト整合性に基づいたクエリ書き換え
LLM が日常のワークフローにますます組み込まれるようになるにつれて、クラウドでホストされる LLM に送信されるユーザー クエリでは、タスクに必須のコンテンツとタスクに必須ではない機密情報の開示が日常的に混在していますが、タイプベースの PII 秘匿化はコンテキストに依存せず、2 つの問題が生じる可能性があります。それは、型指定されていない機密コンテキストの開示の過剰と、回答を含むスパンの削除の過剰です。コンテキストの整合性の下で、プライバシーを保持するクエリの書き換えを再検討します。スパンは、タスクに必要な場合にのみ転送されるべきです。 DelegateCI-Bench は、プライバシーを意識した委任向けの初のタスクベースのコンテキスト整合性ベンチマークであり、11 のタスクと 20 のタスク タイプにわたる高品質の合成データ、WildChat ベースの実際のユーザー クエリ、および高密度の機密情報を含む医療課題セットを組み合わせた 3,167 個のサンプルで構成されています。このベンチマークに基づいて、必須および非必須の機密スパンを検証可能な最適化信号に変換する CI ガイド付き強化学習フレームワークを提案し、不必要な機密情報の開示を抑制しながらタスクの重要な情報を保持するようにクエリ リライターをトレーニングします。実験の結果、私たちの学習済みリライターはプライバシーとユーティリティの最適なトレードオフを達成し、デバイス上のベースラインに対して最大 +10.1 の平均ユーティリティを達成することがわかりました。
原文 (English)
Need to Know: Contextual-Integrity-Grounded Query Rewriting for Privacy-Conscious LLM Delegation
As LLMs become increasingly woven into everyday workflows, user queries sent to cloud hosted LLMs routinely mix task-essential content with task non-essential sensitive disclosures, yet type based PII redaction is context agnostic and may raise two issues: over disclosing untyped sensitive context and over removing answer bearing spans. We recast privacy preserving query rewriting under Contextual Integrity: a span should be forwarded only if it is necessary for the task. We introduce DelegateCI-Bench, the first task based Contextual Integrity benchmark for privacy-conscious delegation, comprising 3,167 samples that combine high quality synthetic data spanning 11 tasks and 20 task types, WildChat based real user queries, and a medical challenge set with dense sensitive information. Building on this benchmark, we propose a CI-guided reinforcement learning framework that converts essential and non-essential sensitive spans into verifiable optimization signals, and train a query rewriter to preserve task critical information while suppressing unnecessary sensitive disclosure. Experiments show that our learned rewriter achieves the best privacy-utility tradeoff, achieving up to +10.1 average utility over on-device baselines.
TPA-AD: ベアリング時系列異常検出のための 2 段階の擬似異常ガイド方式
本稿では、正常なサンプルのみが利用可能な設定の下での車軸軸受時系列異常検出(時系列異常検出、TSAD)のための二段階の擬似異常ガイド型異常検出手法(\textbf{T}wo-stage \textbf{P}seudo \textbf{A}nomaly-guided \textbf{A}nomaly \textbf{D}etection, \textbf{TPA-AD})を提案する。トレーニング。この方法では、まず、再構成モデルと特徴ごとのターゲット誤差制御を使用して、正常境界付近に疑似異常ウィンドウを生成します。次に、通常ウィンドウと擬似異常ウィンドウ間の対比学習を通じて異常に敏感な表現を学習し、最後に k 近傍 (KNN) を使用してウィンドウ レベルとポイント レベルの異常スコアを生成します。既知の故障カテゴリ、実際の異常事前確率、またはランダムな異常注入に依存する既存の方法と比較して、TPA-AD は境界近傍に擬似異常を構築することで正常境界の分離可能性を向上させ、混合変数シナリオで連続特徴と離散特徴を共同で処理できます。主な実験はベアリングの故障検出データセットと劣化プロセス データセットで行われ、さらに $13$ の公開 TSAD データセットで探索的な拡張が行われます。結果は、提案された手法が比較的安定した異常応答を生成し、劣化の進行に敏感であり、公開 TSAD ベンチマークおよび実際の高速列車関連の方位データにある程度の広範な適用可能性を実証していることを示しています。
原文 (English)
TPA-AD: A Two-Stage Pseudo Anomaly-Guided Method for Bearing Time-Series Anomaly Detection
This paper proposes a two-stage pseudo anomaly-guided anomaly detection method (\textbf{T}wo-stage \textbf{P}seudo \textbf{A}nomaly-guided \textbf{A}nomaly \textbf{D}etection, \textbf{TPA-AD}) for axle-box bearing time-series anomaly detection (time series anomaly detection, TSAD) under the setting where only normal samples are available for training. The method first generates pseudo-anomalous windows near the normal boundary using a reconstruction model and per-feature target-error control. It then learns anomaly-sensitive representations through contrastive learning between normal and pseudo-anomalous windows, and finally produces window-level and point-level anomaly scores using k-nearest neighbors (KNN). Compared with existing methods that rely on known fault categories, real anomaly priors, or random anomaly injection, TPA-AD improves the separability of the normal boundary by constructing pseudo-anomalies in boundary neighborhoods and can jointly handle continuous and discrete features in mixed-variable scenarios. The main experiments are conducted on bearing fault detection datasets and degradation-process datasets, with an additional exploratory extension on $13$ public TSAD datasets. The results show that the proposed method yields relatively stable anomaly responses, is sensitive to degradation evolution, and demonstrates a certain degree of broader applicability on public TSAD benchmarks and real high-speed-train-related bearing data.
適応パッチ適用は時系列予測よりも難しい
アダプティブ パッチは、時系列トランスフォーマーに対する最近の説得力のある提案です。シーケンスが局所的に情報を提供すると思われる場所に、より細かいパッチを割り当てます。この文書では、どのような条件下でコンテンツ適応型パッチ適用オペレータが調整された均一パッチ適用オペレータよりも優れたパフォーマンスを発揮する必要があるかを検討します。局所的な異質性だけでは十分ではありません。点単位の損失予測では、複雑に見える領域が自動的に、より細かいパッチによって損失が軽減される領域になるわけではありません。予算に基づいたビットレート割り当てとしてパッチをモデル化し、よく調整された均一ベースラインを超えるために動的パッチ ルールが満たさなければならない明示的なしきい値を導出し、ローカル (二次代数) とグローバル (モデルの仮定に基づく強い凸性境界) の両方で達成可能な改善を制限します。 2 つの構造的な結果が続きます。結合制約がなければ、スカラーの局所的な複雑さは、共通の損失状況の下で不均一な最適値を生成できません。バックボーンがその表現を意識した最適値にトレーニングされると、アライメント ゲインは適切に調整された均一なパッチ サイズ付近で崩壊します。これらの予測をテストするために、バックボーン、データ、トレーニング プロトコルを固定したまま、各適応メカニズムを均一なパッチサイズのスイープに置き換えて、3 つの代表的なアーキテクチャに対して制御された分離スタディを実行します。標準的な長期予測ベンチマークでは、検証で選択された均一なベースラインは、動的ベースラインと競合しており、設定ごとの効果はゼロ近くに集中しており、結果がデータセットごとに集計されると一貫した方向性の利点はありません。私たちが観察している大きな利益は、メソッドとデータセットに固有のものです。したがって、適応型パッチ適用は、調整された均一なベースラインに対して評価する必要があります。その値は、安価で信頼性の高いルーティング信号が、より細かいパッチが実際に予測損失を削減する場所を特定できるかどうかによって決まります。
原文 (English)
Adaptive Patching Is Harder Than It Looks For Time-Series Forecasting
Adaptive patching is a recent and compelling proposal for time-series Transformers: allocate finer patches where the sequence looks locally informative. This paper asks under what conditions a content-adaptive patching operator should outperform a tuned uniform one. Local heterogeneity alone is not enough: under pointwise forecasting losses, a complex-looking region is not automatically one where finer patching reduces the loss. We model patching as a budgeted bitrate allocation and derive an explicit threshold that a dynamic patching rule must satisfy to beat a well-tuned uniform baseline, then bound the achievable improvement both locally (a quadratic surrogate) and globally (a strong-convexity bound under the model's assumptions). Two structural results follow: without a coupling constraint, scalar local complexity cannot produce a non-uniform optimum under a common loss landscape; and once the backbone is trained to its representation-aware optimum, the alignment gain collapses around a well-tuned uniform patch size. To test these predictions, we run a controlled isolation study on three representative architectures, replacing each adaptive mechanism with a uniform patch-size sweep while keeping the backbone, data, and training protocol fixed. On standard long-horizon forecasting benchmarks, the validation-selected uniform baseline is competitive with the dynamic counterpart, with per-setting effects concentrated near zero and no consistent directional advantage once results are aggregated by dataset. The larger gains we do observe are method- and dataset-specific. Adaptive patching should therefore be evaluated against a tuned uniform baseline; its value depends on whether a cheap and reliable routing signal can identify where finer patches actually reduce forecasting loss.
大規模な言語モデルが報酬と社会をハックする
強化学習 (RL) はトレーニング後のパラダイムの主流となっており、大規模言語モデル (LLM) が報酬から学習できるようになります。私たちは、社会規制が報酬関数と構造的に似ていることを観察しています。それらは測定可能な結果、しきい値、例外を定義しますが、多くの場合、制度上の意図は部分的にしか指定されません。私たちは、RL トレーニング プロセスがこれらのギャップを悪用する可能性があると仮説を立て、RL 中に報酬関数をハッキングするというモデルのよく知られた傾向が、社会ハッキングと呼ばれるより重大な失敗モード、つまり社会が運営されているルールの抜け穴を発見するモードにスケールアップできるかどうかを尋ねます。この現象を研究するために、72 の社会環境のサンドボックスである SocioHack を導入しました。その結果、これらの環境内で報酬ハッキングが自然に発生し、規制の抜け穴の発見につながることがわかりました。モデルは社会ルールをハッキングし、規制の意図を打ち破りながら技術的に準拠した戦略を生成する方法を学習します。現在の LLM セーフガードは限定的な緩和策しか提供しません。したがって、モデルのトレーニングのために実際のフィードバックを収集することには細心の注意が必要であり、実社会で LLM を安全に反復するための次世代のポストトレーニング パラダイムが必要です。=
原文 (English)
Large Language Models Hack Rewards, and Society
Reinforcement learning (RL) has become a dominant post-training paradigm, enabling large language models (LLMs) to learn from rewards. We observe that societal regulations are structurally similar to reward functions. They define measurable outcomes, thresholds, and exceptions, while often leaving institutional intent only partially specified. We hypothesise that the RL training process may exploit these gaps and therefore ask whether models' well-known tendency to hack reward functions during RL can scale into a more consequential failure mode named societal hacking: discovering loopholes in the rules society runs on. To study this phenomenon, we introduce SocioHack, a sandbox of 72 societal environments, and find that within these environments, reward hacking naturally emerges and leads to regulatory loophole discovery. Models learn to hack the social rules and generate strategies that remain technically compliant while defeating regulatory intent, and current LLM safeguards provide only limited mitigation. Therefore, collecting in-the-wild feedback for model training requires greater caution, and we need a next-generation post-training paradigm for safely iterating LLMs in real society.=
POLARIS: 小さなモデルが長い物語を書けるように導く
小規模なオープンウェイト モデルは、長編のクリエイティブ ライティングに苦労します。特にフロンティア モデルと比較した場合、生成されるストーリーが要求された長さに大幅に満たないか、長さが増加するにつれて品質が大幅に低下します。我々は、2 つの重要な要素を備えた低コンピューティングの GRPO レシピである POLARIS (審査員としての LLM 報酬とストーリーライティングのためのアンカー参照注入によるポリシーの最適化) を紹介します。1 つはオンライン報酬として構造化されたストーリー品質ルーブリックを持つフロンティア LLM 審査員、もう 1 つは教師が強制的に人間が書いたストーリーが各 GRPO グループ内で高報酬のアンカーとして機能する人間参照注入 (HRI) です。 100 の短編小説アンソロジーと 4 つの A100 GPU から派生した約 1.4K のプロンプト ストーリー ペアのデータセットを使用して、トレーニング レシピを Qwen3.5-9B に適用することにより、POLARIS-9B が得られます。配布内および配布外のプロンプトとルーブリックにわたる 5 つのベンチマークにわたって、POLARIS-9B は、長さの指示により厳密に従いながら、はるかに大きなオープンウェイト モデルと競合します。人間による盲検評価により、POLARIS-9B がベースの Qwen3.5-9B よりも好まれ、Qwen3.5-27B と同等であることが確認されました。 POLARIS-9B は、最大 4k ワードまでのストーリーのみをトレーニングしているにもかかわらず、トレーニング長の最大 3 倍のストーリーを要求するプロンプトの品質を維持します。これは、ほとんどのオープンウェイト モデルが品質、長さの遵守、またはその両方において大幅に低下する状況です。より広範に、私たちの結果は、長さの一般化がクリエイティブライティングモデルにとって意味のあるストレステストであり、他の点では近いモデルを区別するための有用なレンズであることを示唆しています。
原文 (English)
POLARIS: Guiding Small Models to Write Long Stories
Small open-weight models struggle at long-form creative writing: their generated stories either fall far short of the requested length, or their quality significantly degrades as length increases, especially when compared to frontier models. We present POLARIS (Policy Optimization with LLM-as-a-judge rewards and Anchored-Reference Injection for Storywriting), a lower-compute GRPO recipe with two key ingredients: a frontier LLM judge with a structured Story Quality rubric as the online reward, and human-reference injection (HRI), where a teacher-forced human-written story serves as a high-reward anchor within each GRPO group. By applying our training recipe to Qwen3.5-9B, using a dataset of approximately 1.4K prompt-story pairs derived from 100 short-story anthologies and 4 A100 GPUs, we obtain POLARIS-9B. Across five benchmarks spanning in-distribution and out-of-distribution prompts and rubrics, POLARIS-9B is competitive with much larger open-weight models while following length instructions more closely. A blinded human evaluation confirms that POLARIS-9B is preferred to the base Qwen3.5-9B and on par with Qwen3.5-27B. Despite training only on stories up to 4k words, POLARIS-9B preserves quality on prompts requesting stories up to 3 times the training length, a regime where most open-weight models degrade substantially in quality, length adherence, or both. More broadly, our results suggest that length generalization is a meaningful stress test for creative-writing models and a useful lens for distinguishing otherwise close models.
微分可能聴覚ループ (DAL): ハイパーパーソナライズされた補聴器のための ML フレームワーク
従来の補聴器は、感度の低下を管理するために周波数に依存する固定の増幅と圧縮に依存しており、複数の話者がいる状況(「カクテルパーティー」問題)など、複雑な環境では十分な聴取サポートを提供できないことがよくあります。難聴の根本的な符号化機能障害により包括的に対処するために、パーソナライズされた補聴器の設計とフィッティングのための新しいオープンソース フレームワークである Differentiable Auditory Loop (DAL) を導入します。 DAL の最初の実装には、人間の蝸牛機能の微分可能なモデルである CARFAC が組み込まれており、これを JAX に移植して、障害のある聴覚神経活動パターンを正常な聴覚基準と一致させるためにディープ ニューラル ネットワークを最適化します。必要とされるきめ細かい分光時間信号処理を備えた補聴器を構築するために、波形間の完全畳み込み UNet ジェネレーターである SEANet を採用しています。正常な聴覚に適合した CARFAC モデルの出力と、各被験者の個々の聴覚障害に適合する CARFAC モデルの出力を比較することで、ネットワークを微調整します。比較は、それぞれの CARFAC 神経活動パターン (NAP) 出力と安定化聴覚画像 (SAI) から導出された損失関数を使用して行われ、後者は聴覚神経出力における位相非感受性の時間構造を捕捉する 2D 表現を提供します。 SEANet モデルは、勾配降下法を通じて、入力のノイズを除去することと、障害のある CARFAC モデルによってモデル化された難聴を補償することの両方を学習します。神経表現と信号忠実度の測定基準全体で、DAL に最適化された SEANet モデルは、テストされたマスター補聴器 (MHA) のベースラインを上回りました。 DAL フレームワークは、モデルベースの機械学習駆動の補聴器信号処理のパーソナライゼーションへの実用的な道を提供します。次のステップには、実際の臨床試験を可能にするハードウェアの導入が含まれます。
原文 (English)
The Differentiable Auditory Loop (DAL): An ML Framework for Hyper-Personalized Hearing Aids
Conventional hearing aids rely on fixed, frequency-dependent amplification and compression to manage reduced sensitivity, which often fails to provide sufficient listening support in complex environments, such as situations with multiple speakers (the ``cocktail party'' problem). To more comprehensively address the underlying encoding dysfunctions of hearing loss, we introduce the Differentiable Auditory Loop (DAL), a new open-source framework for personalized hearing aid design and fitting. Our first implementation of DAL incorporates CARFAC, a differentiable model of human cochlear function, which we ported to JAX, to optimize a deep neural network to match impaired auditory neural activity patterns with a normal-hearing reference. To build a hearing aid with the fine-grained spectro-temporal signal processing required, we adopt SEANet, a waveform-to-waveform fully convolutional UNet generator. We fine-tune the network by comparing the outputs of a CARFAC model fitted to normal hearing with that of a CARFAC model fitted to match each subject's individual hearing impairment. The comparison is done using loss functions derived from the respective CARFAC neural activity pattern (NAP) outputs and stabilized auditory images (SAIs), the latter providing a 2D representation that captures phase-insensitive temporal structure in the auditory nerve output. Through gradient descent, the SEANet model learns to both denoise the input and compensate for the hearing loss modelled by the impaired CARFAC model. Across neural-representation and signal-fidelity metrics, the DAL-optimized SEANet model outperformed the tested master hearing aid (MHA) baselines. The DAL framework provides a practical path toward model-based, machine-learning-driven personalization of hearing aid signal processing. Next steps include hardware deployment to enable real-world clinical testing.
証拠を運ぶエージェント アクション: 異種エージェント システムに対するモデルに依存しないランタイム ガバナンス
エージェント システムは、ローカル コーディング ツール、フレームワーク SDK、マネージド エージェント プラットフォーム、API ゲートウェイ、オブザーバーのみの統合など、非常に異なる制御ポイントを備えたランタイムを通じて実行されます。したがって、データを外部に公開するなどの高リスクのアクションは、あるランタイムではシェル コマンドとして、別のランタイムではツール呼び出しとして、そして 3 番目のランタイムではホストされたセッションの移行として現れる可能性があります。このため、ガバナンスの基本的な質問に一貫して答えることが困難になります。つまり、どのようなアクションが、誰の権限の下で、どのような承認セマンティクスに基づいて、実行後にどのような証拠によって承認されたのかということです。このペーパーでは、ベンダー ネイティブのセッション レコードではなくアクション証明書を中心としたランタイム中立のガバナンス モデルである Proof-Carrying Agent Actions (PCAA) について説明します。 PCAA は、アクション前の許容性、アクションのオープン、仮定のキャプチャ、承認、結果のクローズという 5 つのチェックポイントを中心にコントロールを組織します。これらのチェックポイントは、ポータブルなアクション エンベロープ、実行時および承認のレシート、および再生可能なプルーフにバインドされます。このモデルは 2 つの実用的な方法で拡張されています。証明書は外部性を認識しており、宛先の可視性やアカウントの来歴などの境界事実を伝えます。もう 1 つは、承認は、単一のレビュー済みまたは未レビューのビットではなく、明示的な強制力クラスによって記述されます。私たちは、異種エージェント コントロール プレーンでの参照実装と開示制限のある評価プロトコルを通じてモデルを研究します。 4 つのランタイム ファミリにわたる 24 個の実行可能シードから 96 個のトレースに拡張された保護されたベンチマークでは、PCAA はルートの品質を維持しながら、アブレーション下で個別の障害モードを明らかにします。この論文は、証明書を保持するアクションに関するランタイム ガバナンスのシステム定式化と、その定式化がベンダー固有のコントロール サーフェスに崩壊することなくランタイム チャーンの下で移植性を維持できる方法についての実装に基づいた説明に貢献します。
原文 (English)
Proof-Carrying Agent Actions: Model-Agnostic Runtime Governance for Heterogeneous Agent Systems
Agent systems execute through runtimes with very different control points: local coding tools, framework SDKs, managed agent platforms, API gateways, and observer-only integrations. A high-risk action such as publishing data externally may therefore appear as a shell command in one runtime, a tool call in another, and a hosted session transition in a third. This makes it difficult to answer a basic governance question consistently: what action was authorized, under whose authority, with what approval semantics, and with what evidence after execution? This paper presents Proof-Carrying Agent Actions (PCAA), a runtime-neutral governance model centered on an action certificate rather than on a vendor-native session record. PCAA organizes control around five checkpoints: pre-action admissibility, action open, assumption capture, approval, and outcome closure. It binds these checkpoints to a portable action envelope, runtime and approval receipts, and replay-ready proof. The model is extended in two practical ways: the certificate is externality-aware, carrying boundary facts such as destination visibility and account provenance, and approval is described by explicit enforceability classes rather than by a single reviewed or unreviewed bit. We study the model through a reference implementation in a heterogeneous agent control plane and a disclosure-bounded evaluation protocol. On a protected benchmark expanded from 24 executable seeds to 96 traces across four runtime families, PCAA preserves route quality while exposing distinct failure modes under ablation. The paper contributes a systems formulation of runtime governance around certificate-bearing actions and an implementation-grounded account of how that formulation can remain portable under runtime churn without collapsing into vendor-specific control surfaces.
マシンインテリジェンスの Ph(ysical)AI 層の構築
基礎モデルは、多様なデータに対する大規模なトレーニングを通じて一般化を実現しますが、ペアになったトレーニング データなしで真に目に見えないドメインへの転送には制限があります。私たちは、束縛されていない統計的相関を学習するのではなく、信号理論の原理 (フーリエ分解、エネルギー保存、対称性) をエンコードする原理駆動型の基礎モデルを提案します。私たちは、ドメインの違いは基礎物理学ではなく、時間、周波数、大きさ、または位相における学習可能な変換にあると仮説を立てます。これらの原則を組み込んだ、共同設計されたアーキテクチャと損失を備えた無線周波数 (RF) データのみをトレーニングすることで、RF データから学習したフリーズ表現のみを使用してオーディオ、画像、テキスト、ビデオへのクロスモーダル転送を実現し、ターゲット ドメインでのエンコーダーの微調整を必要としません。当社の 199 万パラメータのフローズン エンコーダは、リニア プロービングによる 15 の多様なタスクにわたって平均精度 77.7% (トップ 3 の 91.9%) を達成します。系統的な変動はあります。物理的に接地されたタスク (話者認識、地震学、RF フィンガープリンティング) では 84.5 %、セマンティック タスク (音楽ジャンル、言語認識) では 70.0% です。これは、原則主導型アプローチとスケール主導型アプローチが補完的な道を提供することを明らかにしています。物理原則は効率的なクロスモーダル転送を可能にし、同時に物理的理解と意味論的理解の間の境界を自然に確立します。
原文 (English)
Building The Ph(ysical)AI Layer Of Machine Intelligence
Foundation models achieve generalization through massive-scale training on diverse data, but have limitations with transfer to truly unseen domains without paired training data. We propose principle-driven foundation models that encode signal-theoretic principles (Fourier decomposition, energy conservation, symmetry) rather than learn untethered statistical correlations. We hypothesize that domains differ not in fundamental physics, but in learnable transformations in time, frequency, magnitude, or phase. Training exclusively on radio-frequency (RF) data with co-designed architecture and losses incorporating these principles, we achieve cross-modal transfer to audio, images, text, and video using only frozen representations learned from RF data, requiring no fine-tuning of the encoder on target domains. Our 1.99M parameter frozen encoder achieves 77.7% average accuracy (91.9% top-3) across 15 diverse tasks via linear probing, with systematic variation: 84.5 on physically-grounded tasks (speaker recognition, seismology, RF fingerprinting) versus 70.0% on semantic tasks (music genre, language recognition). This reveals that principle-driven and scale-driven approaches offer complementary paths: physical principles enable efficient cross-modal transfer while naturally establishing the boundary between physical and semantic understanding.
SymTRELLIS: 3D 生成のための対称性強化ボクセル潜在
シングルビュー 3D 生成モデルは、優れた視覚的品質を実現していますが、構造的または機能的要件を満たすように設計されておらず、実際には不十分なことがよくあります。対称性もそのような要件の 1 つです。対称性に違反すると、たとえそれが微妙な場合でも、モデルが物理的に使用できなくなる可能性があります。 SymTRELLIS は、基礎となる VAE やフロー モデルを再トレーニングすることなく、TRELLIS.2 のフローベース 3D 生成中に任意の有限点群対称 (回転、鏡映、多面体) を強制する手法です。私たちの重要なアイデアは、一般的な非対称 3D データでトレーニングされた軽量の空間変換潜在マッパーとして実装された、ボクセル潜在に対する学習済み線形演算子として空間変換の潜在空間アクションを近似することです。生成時に、各 ODE ステップですべての対称に相当する変換にわたって予測流速を平均することによって対称性を強制します。このプロセスを速度対称化と呼びます。対称仕様は、初期の TRELLIS.2 生成から自動的に推定することも、ユーザーが指定することもでき、入力画像が示唆するものを超えた意図的な折り操作が可能になります。 2 ~ 20 回の回転と多面体対称グループにわたる 266 個の厳密に対称なオブジェクトの厳選されたベンチマークでは、SymTRELLIS は、ベース モデルと同等の再構築精度を維持しながら、TRELLIS.2、Hunyuan3D-2.1、および TripoSG と比較してすべての対称誤差メトリクスを大幅に削減します。
原文 (English)
SymTRELLIS: Symmetry-Enforced Voxel Latents for 3D Generation
Single-view 3D generative models have achieved impressive visual quality, yet they are not designed to satisfy structural or functional requirements, and in practice, often fall short. Symmetry is one such requirement: violations, even subtle ones, on symmetry can render a model physically unusable. We present SymTRELLIS, a method that enforces arbitrary finite point group symmetries (rotational, reflectional, and polyhedral) during the flow-based 3D generation of TRELLIS.2, without retraining the underlying VAE or flow model. Our key idea is to approximate the latent-space action of spatial transformations as a learned linear operator on voxel latents, implemented as a lightweight spatial-transform latent mapper trained on generic, non-symmetric 3D data. At generation time, we enforce symmetry by averaging predicted flow velocities across all symmetry-equivalent transformations at each ODE step, a process we call velocity symmetrization. The symmetry specification can be estimated automatically from an initial TRELLIS.2 generation or supplied by the user, enabling deliberate fold manipulation beyond what the input image suggests. On a curated benchmark of 266 strictly symmetric objects spanning 2- to 20-fold rotations and polyhedral symmetry groups, SymTRELLIS substantially reduces all symmetry error metrics compared to TRELLIS.2, Hunyuan3D-2.1, and TripoSG, while maintaining reconstruction accuracy comparable to the base model.
AgenticDiffusion: ビジョンベースの UAV ナビゲーションのための Agentic Diffusion ベースの経路計画
屋内 UAV ナビゲーションには、限られた視野の観察下での効率的な探索、シーンの理解、信頼性の高い軌道の実行が必要です。既存のビジョンベースのナビゲーション フレームワークは通常、単一ビューの観察に依存しており、オクルージョン、ターゲットの可視性、およびグローバル シーン構造について推論する能力が制限されています。この研究では、統合された航空ナビゲーション パイプライン内で、言語に基づく推論、オープン語彙によるターゲットのグラウンディング、視覚ベースの拡散計画、および NMPC を調整するマルチビュー UAV ナビゲーション フレームワークである AgenticDiffusion を提案します。自然言語による指示と、同期した一人称視点 (FPV) および上面視点の観察を考慮して、フレームワークはナビゲーションに最も有益な視点を決定し、軌道の実行前にミッション計画を生成します。ターゲットは、オープンボキャブラリーグラウンディングモデルを使用して位置特定され、その後、視点固有の拡散プランナーが UAV 実行のためのナビゲーション軌道を生成します。提案されたフレームワークは、補完的な視点を使用して、繰り返しのターゲット探査を削減し、雑然とした屋内環境でのナビゲーション効率を向上させます。このフレームワークは、適応視点選択、多段階ミッション実行、長距離ナビゲーション、安全な着陸地点選択を含む 4 つの現実世界の UAV ナビゲーション シナリオで検証されました。実験結果では、40 回の実世界試験でミッション全体の成功率が 80% であることが実証され、一方、拡散計画者は軌道生成の成功率が 100% に達しました。
原文 (English)
AgenticDiffusion: Agentic Diffusion-based Path Planning for Vision-Based UAV Navigation
Indoor UAV navigation requires efficient exploration, scene understanding, and reliable trajectory execution under limited field-of-view observations. Existing vision-based navigation frameworks typically rely on single-view observations, limiting their ability to reason about occlusions, target visibility, and global scene structure. In this work, we propose AgenticDiffusion, a multi-view UAV navigation framework that coordinates language-guided reasoning, open-vocabulary target grounding, vision-based diffusion planning, and NMPC within a unified aerial navigation pipeline. Given a natural language instruction and synchronized first-person-view (FPV) and top-view observations, the framework determines the most informative viewpoint for navigation and generates a mission plan prior to trajectory execution. The targets are localized using an open-vocabulary grounding model, after which viewpoint-specific diffusion planners generate navigation trajectories for UAV execution. Using complementary viewpoints, the proposed framework reduces repeated target exploration and improves navigation efficiency in cluttered indoor environments. The framework was validated in four real-world UAV navigation scenarios involving adaptive viewpoint selection, multi-stage mission execution, long-horizon navigation, and safe landing-site selection. The experimental results demonstrated an overall mission success rate of 80% in 40 real-world trials, while the diffusion planners achieved a trajectory generation success rate of 100%.
dMX: 低精度浮動小数点フォーマットの微分可能な混合精度代入
大規模言語モデル (LLM) を低精度の浮動小数点表現に量子化することは、効率的な展開の中心となりますが、単一のビット幅をすべてのレイヤーに均一に適用することは、パフォーマンスと精度の両方の点で最適とは言えません。この研究では、学習可能な浮動小数点ビット幅割り当てのための微分可能な混合精度量子化フレームワークである dMX を紹介します。私たちは、オープン コンピューティング プロジェクト (OCP) 標準によって定義されたデータ型のマイクロスケーリング浮動小数点 (MXFP) ファミリへの応用を研究します。レイヤごとのビット幅の割り当ては、各レイヤの浮動小数点形式がスカラー パラメータによってパラメータ化され、多変量設計空間を単一の学習可能なオフセットに折りたたむ連続最適化問題として定式化されます。トレーニング中、このオフセットは連続値をとり、離散量子化形式間の突然の振動を回避します。温度ベースのアニーリング スケジュールにより、学習されたオフセットが段階的に離散化され、トレーニング動作と推論動作の間で突然移行することなく、最終的な構成がハードウェア互換の MXFP 形式にマッピングされることが保証されます。ターゲットを意識した正則化用語は、平均ビット幅をユーザー指定の予算に向けて導き、推論コストの大まかな代理として機能し、モデルの品質と展開効率のバランスをとります。私たちは Llama、Qwen3、SmolLM2 などのさまざまな LLM ファミリで実験を実行し、WikiText-2 での複雑性と 4 つのゼロショット推論ベンチマークでの精度を評価しました。これらの設定全体にわたって、dMX は一貫してパレート支配モデルを生成し、カルバック ライブラー (KL) 発散ベースのレイヤー選択ヒューリスティックを改善し、モデルの品質と平均ビット幅の間のトレードオフを効率的にナビゲートします。
原文 (English)
dMX: Differentiable Mixed-Precision Assignment for Low-Precision Floating-Point Formats
Quantizing large language models (LLMs) to low-precision floating-point representations is central to efficient deployment, yet applying a single bit-width uniformly across all layers is sub-optimal in terms of both performance and accuracy. This work introduces dMX, a differentiable mixed-precision quantization framework for learnable floating-point bit-width assignment. We study its application for the microscaling floating-point (MXFP) family of data types defined by the Open Compute Project (OCP) standard. The per-layer bit-width assignment is formulated as a continuous optimization problem in which each layer's floating-point format format is parameterized by a scalar parameter, folding the multi-variate design space into a single learnable offset. During training this offset takes continuous values, avoiding sudden oscillations between discrete quantization formats. A temperature-based annealing schedule progressively discretizes the learned offsets, ensuring that the final configuration maps to hardware-compatible MXFP formats without abrupt transitions between training and inference behavior. A target-aware regularization term steers the average bit-width toward a user-specified budget, serving as a coarse-grained proxy for inference cost and balancing model quality against deployment efficiency. We performed experiments on different families of LLM, such as Llama, Qwen3, and SmolLM2, evaluating perplexity on WikiText-2 and accuracy on four zero-shot reasoning benchmarks. Across these settings, dMX consistently yields Pareto-dominating models and improves over Kullback-Leibler (KL) divergence-based layer-selection heuristics, efficiently navigating trade-offs between model quality and average bit-width.
SaliMory: 会話エージェントの認知記憶を調整する
生涯の伴侶として機能する会話エージェントは、すべての対話にわたって永続的な記憶を維持する必要があります。ただし、生の取得でコンテキスト ウィンドウを単純に拡張すると推論の品質が低下し、標準の強化学習による記憶エージェントのトレーニングでは、多段階パイプラインで深刻なクレジット割り当てのボトルネックが発生します。これを解決するために、単一言語モデルをトレーニングして、ユーザーの事実、好み、作業記憶にまたがる認知的に構造化された記憶を管理するフレームワークである SALIMORY を紹介します。 SALIMORY は、階層的な段階ごとのプロセス報酬と報酬分解された対照的洗練を導入することにより、個別の記憶操作 (選択的フィルタリング、統合、およびキュー主導のリコール) をエンドツーエンドで個別に監視します。 SALIMORY はメモリに起因する障害を 3 分の 1 に削減し、エンドツーエンドの精度で最先端のものを 10% 以上上回り、Good Personalization 率を 2 倍以上に高めます。
原文 (English)
SaliMory: Orchestrating Cognitive Memory for Conversational Agents
Conversational agents that serve as lifelong companions must maintain persistent memory across all interactions. However, simply expanding context windows with raw retrieval degrades reasoning quality, while training memory agents via standard reinforcement learning creates a severe credit assignment bottleneck in a multi-stage pipeline. To solve this, we introduce SALIMORY, a framework that trains a single language model to manage a cognitively-structured memory-spanning user facts, preferences, and working memory. By introducing a hierarchical stage-wise process reward and reward-decomposed contrastive refinement, SALIMORY provides isolated supervision for distinct memory operations (selective filtering, consolidation, and cue-driven recall) end-to-end. SALIMORY cuts memory-attributed failures by one-third, outperforms the state-of-the-art by over 10% in end-to-end accuracy, and more than doubles the Good Personalization rate.
大規模言語モデルによる適応軌道最適化のためのセマンティック制約合成
軌道の最適化は、宇宙探査において安全で信頼性の高い自律運用を可能にするための重要なコンポーネントです。宇宙ミッションの頻度、複雑さ、範囲が増加するにつれて、ミッションの目的と運用上の制約を正確に反映する、数学的に適切な軌道最適化問題を迅速に定式化する必要性が高まっています。ただし、ミッションの意図を軌道最適化のための扱いやすい分析公式に変換するには、かなりの専門知識が必要です。この論文では、大規模言語モデル (LLM) を活用して、ミッションの要件と制約の自然言語記述を実行可能な軌道最適化コードと対応する数学的定式化に変換するフレームワークを紹介します。宇宙船ランデブーシナリオでの実験では、意味論的なミッション要件から凸軌道最適化問題を再調整する際の高い成功率が実証されています。最終的に、この研究は、高レベルの意図と形式的な最適化モデルを橋渡しする LLM の可能性を強調し、宇宙船のより柔軟で効率的な軌道設計を可能にします。
原文 (English)
Semantic Constraint Synthesis for Adaptive Trajectory Optimization via Large Language Models
Trajectory optimization is a critical component for enabling safe and reliable autonomous operations in space exploration. As space missions increase in frequency, complexity, and scope, there is a growing need to rapidly formulate mathematically sound trajectory optimization problems that accurately reflect mission objectives and operational constraints. However, translating mission intent into tractable analytical formulations for trajectory optimization requires substantial domain expertise. This paper presents a framework that leverages large language models (LLMs) to translate natural language descriptions of mission requirements and constraints into executable trajectory optimization code and corresponding mathematical formulations. Experiments in spacecraft rendezvous scenarios demonstrate a high success rate in reconditioning a convex trajectory optimization problem from semantic mission requirements. Ultimately, this work highlights the potential of LLMs to bridge high-level intent and formal optimization models, enabling more flexible and efficient trajectory design of spacecraft.
HighTide: エージェントが厳選したオープンソース VLSI ベンチマーク スイート
進化する AI 支援ベンチマーク スイートである HighTide を紹介します。具体的には、(i) 複数の設計言語とテクノロジ ノードにまたがる多様なオープンソース スイート、(ii) リモート キャッシュを備えた Bazel ベースの増分 RTL から GDS へのコンパイル、(iii) スイート全体の調整理論的根拠の長期記憶として機能する設計ごとの意思決定ログに裏付けられた、設計ライフサイクル、フロー最適化、ツール リファレンス、メタ メンテナンスをカバーする 12 のエージェント スキルによる AI 支援の設計キュレーション、および(iv) 安定リリース用の RTL コンパイル検証を備えたインフラストラクチャ。このスイートは一般公開されており、オープンソースのハードウェア エコシステムとともに成長するように設計されています。
原文 (English)
HighTide: An Agent-Curated Open-Source VLSI Benchmark Suite
We introduce HighTide, an evolving AI-assisted benchmark suite. Specifically, the contributions are: (i) a diverse open-source suite spanning multiple design languages and technology nodes, (ii) Bazel-based incremental RTL-to-GDS compilation with remote caching, (iii) AI-assisted design curation through twelve agent skills covering the design lifecycle, flow optimization, tool reference, and meta-maintenance, backed by per-design decision logs that serve as long-term memory of tuning rationale across the suite, and (iv) an infrastructure with RTL compilation verification for stable releases. The suite is publicly available and designed to grow with the open-source hardware ecosystem.
Caught in the Act(ivation): LLM エージェントによる資格情報漏洩の事前出力およびマルチターン検出に向けて
LLM エージェントは多くの場合、機密認証情報を信頼できない取得コンテンツと同じコンテキスト ウィンドウに配置し、認証情報の漏洩を誘発する間接的なプロンプト インジェクションの直接パスを作成します。私たちは、3 つの相補的な防御を通じてこの障害モードを研究します。まず、出力トークンが発行される前に、アクティベーション プローブが資格情報へのアクセスを検出できるかどうかを尋ねます。次に、形式固有の文字モデルからハニートークンを構築し、分割等角予測で検出を調整します。 3 番目に、複数ターンにわたる漏洩を累積的な情報フロー問題として扱い、会話ターン全体での推定漏洩予算を追跡します。オープンウェイト モデルの制御された実験では、アクティベーション機能により、ホールドアウト エンコーディング変換下を含め、無害なプロンプトと認証情報を求めるプロンプトが高精度で分離されます。小規模な合成マルチターン スイートでは、累積アカウンティングにより、ターンごとの検出器が見逃した攻撃が検出されます。これらの結果は暫定的なものです。マルチターン ベンチマークは社内で小規模なものであり、アクティブ化方法にはホワイト ボックス アクセスが必要であり、情報推定ツールは正式な上限ではなく実用的なシグナルを提供します。それでも、この結果は、資格情報の漏洩防御には、テキストレベルの出力フィルターのみに依存するのではなく、出力前の監視、調整されたカナリア検出、および一時的な漏洩アカウンティングを組み合わせる必要があることを示唆しています。
原文 (English)
Caught in the Act(ivation): Toward Pre-Output and Multi-Turn Detection of Credential Exfiltration by LLM Agents
LLM agents often place sensitive credentials in the same context window as untrusted retrieved content, creating a direct path for indirect prompt injection to induce credential exfiltration. We study this failure mode through three complementary defenses. First, we ask whether activation probes can detect credential access before output tokens are emitted. Second, we construct honeytokens from format-specific character models and calibrate detection with split conformal prediction. Third, we treat multi-turn exfiltration as a cumulative information-flow problem and track an estimated leakage budget across conversation turns. In controlled experiments on open-weight models, activation features separate benign and credential-seeking prompts with high accuracy, including under held-out encoding transformations. In a small synthetic multi-turn suite, cumulative accounting detects attacks that per-turn detectors miss. These results are preliminary: the multi-turn benchmark is in-house and small, the activation method requires white-box access, and the information estimator provides a practical signal rather than a formal upper bound. Still, the results suggest that credential-exfiltration defenses should combine pre-output monitoring, calibrated canary detection, and temporal leakage accounting rather than relying only on text-level output filters.
短期洪水予測のための物理学に基づいた機械学習
正確な洪水予測は、災害リスクを軽減し、コミュニティを保護するために不可欠です。ただし、純粋にデータ駆動型の機械学習モデルは、データが不足している環境では苦労することが多く、基本的な水文学原則に違反する可能性があります。標準の Long Short-Term Memory (LSTM) ネットワークは、特に極端な気象条件を推定する場合に、物理的に矛盾した予測を生成する可能性があります。これらの制限に対処するために、私たちは、水文学的な知識を LSTM モデルの損失関数に直接組み込む、物理情報に基づく機械学習 (PIML) フレームワークを提案します。具体的には、トレンド アライメント制約により、降水量と流量の傾向間の方向性の不一致にペナルティが課され、複雑な流体力学方程式を必要とせずにモデルの堅牢性が向上します。この正則化により、トレーニング データが限られている場合でも、物理的に妥当な水路図の動作をモデルが学習できるようになり、洪水のピーク時の信頼性が向上します。実験結果は、提案された物理情報モデルがデータ不足の設定において標準の LSTM ベースラインを上回り、利用可能なデータのわずか 5% でトレーニングされた場合にナッシュ・サトクリフ効率 (NSE) が 0.20 から 0.23 に増加することを示しています。シミュレーションされた極端な気候シナリオでの追加のストレス テストでは、ベースライン モデルが不安定な挙動を示すのに対し、物理学に基づいたモデルは方向の一貫性と物理的妥当性を維持していることが実証されました。データが限られているため、極端なピークの大きさを正確に予測することは依然として困難ですが、提案されたアプローチは、純粋にデータ駆動型のモデルによくある非物理的な変動を大幅に軽減します。これらの発見は、単純な物理的制約によって、リアルタイム洪水予測のための深層学習モデルの信頼性が大幅に向上し、計測されていない盆地や進化する気候条件に対する実用的なソリューションを提供できることを示しています。
原文 (English)
Physics-Informed Machine Learning for Short-Term Flood Prediction
Accurate flood forecasting is essential for mitigating disaster risks and protecting communities. However, purely data-driven machine learning models often struggle in data-scarce environments and may violate fundamental hydrological principles. Standard Long Short-Term Memory (LSTM) networks can generate physically inconsistent predictions, particularly when extrapolating to extreme weather conditions. To address these limitations, we propose a Physics-Informed Machine Learning (PIML) framework that incorporates hydrological knowledge directly into the loss function of an LSTM model. Specifically, a Trend Alignment constraint penalizes directional inconsistencies between precipitation and discharge trends, improving model robustness without requiring complex hydrodynamic equations. This regularization encourages the model to learn physically plausible hydrograph behavior, even with limited training data, while enhancing reliability during peak flood events. Experimental results show that the proposed physics-informed model outperforms a standard LSTM baseline in data-scarce settings, increasing the Nash-Sutcliffe Efficiency (NSE) from 0.20 to 0.23 when trained on only 5% of the available data. Additional stress tests under simulated extreme climate scenarios demonstrate that the baseline model exhibits unstable behavior, whereas the physics-informed model maintains directional consistency and physical plausibility. Although accurately predicting extreme peak magnitudes remains challenging with limited data, the proposed approach substantially reduces unphysical fluctuations common in purely data-driven models. These findings demonstrate that simple physical constraints can significantly improve the reliability of deep learning models for real-time flood forecasting, offering a practical solution for ungauged basins and evolving climate conditions.
EvalStop: ワールド フィードバックを使用して、マルチテナント RLHF プラットフォームにおける報酬の過剰最適化を検出および修正する
Cloud LLM 微調整プラットフォームは RLHF ワークロードにますます対応しており、学習された報酬モデルが人間の品質の代用として最適化されています。 Gao らのように(2023) は、このプロキシは、報酬の過剰最適化として知られる現象である持続的な最適化圧力の下で、世界のフィードバック (下流の評価指標) から乖離することを示しました。既存のプラットフォーム スケジューラはこの相違を無視しています。非千里眼スケジューラは品質信号なしで JCT を最適化し、SLAQ スタイルの品質認識スケジューラはトレーニング損失 (ハッキングによって単調に低下する弱いプロキシ) を使用し、古典的なジョブごとの早期停止では人間による監視が必要であり、共有 GPU を解放しません。私たちは、evalStop を提案します。これは、k 回連続して eval スコアが低下したときにジョブを終了し、GPU を解放し、最適なチェックポイントを保持し、任意のベース スケジューラに委任する、コンポーザブルなスケジューリング プリミティブです。私たちは、スケジューラレベルの早期停止を検出問題としてフレーム化し、RLHF ワークロードが報酬ハッキングと構造的に健全な実行を混合し、スケジューラから隠蔽されたグランドトゥルースラベルを使用した離散イベントシミュレータでそれを評価します。 RLHF の負荷が高いワークロード (RLHF 80%、GPU 64 基) では、EvalStop は精度 98% / リコール 99% / FPR 1.5% を達成し、SRTF-Est と比較して JCT を 9% 改善し、無駄なコンピューティングを 22% 削減します (p<0.05)。些細な固定進捗と損失プラトーの競合他社は、健全な RLHF で 65% の FPR を被るか、真のハッキング ケースの半分以上を見逃すかのどちらかです。ゲインはテストされたすべてのベース スケジューラにわたって構成され (9 ~ 25% の JCT)、検出品質は評価ノイズ (ノイズ std <= 0.05 で少なくとも 91% の精度) およびハッキングのベース レート (20 ~ 80% のハッキング部分で少なくとも 89% の精度) の下で安定しています。
原文 (English)
EvalStop: Using World Feedback to Detect and Correct Reward Overoptimization in Multi-Tenant RLHF Platforms
Cloud LLM fine-tuning platforms increasingly serve RLHF workloads, where a learned reward model is optimized as a proxy for human quality. As Gao et al. (2023) showed, this proxy diverges from world feedback (downstream eval metrics) under sustained optimization pressure, a phenomenon known as reward overoptimization. Existing platform schedulers ignore this divergence: non-clairvoyant schedulers optimize JCT without any quality signal, SLAQ-style quality-aware schedulers use training loss (a weaker proxy that drops monotonically through hacking), and classical per-job early stopping requires human monitoring and does not free shared GPUs. We propose EvalStop, a composable scheduling primitive that terminates jobs on k consecutive eval-score declines, releases GPUs, preserves the best checkpoint, and delegates to any base scheduler. We frame scheduler-level early stopping as a detection problem and evaluate it in a discrete-event simulator whose RLHF workload mixes reward-hacking and structurally healthy runs, with ground-truth labels hidden from schedulers. On RLHF-heavy workloads (80% RLHF, 64 GPUs), EvalStop achieves precision 98% / recall 99% / FPR 1.5% while improving JCT by 9% and cutting wasted compute by 22% over SRTF-Est (p<0.05). Trivial fixed-progress and loss-plateau competitors either incur 65% FPR on healthy RLHF or miss over half of true hacking cases. Gains compose across every base scheduler tested (9-25% JCT) and detection quality stays stable under eval noise (precision at least 91% at noise std <= 0.05) and hacking base rate (precision at least 89% across 20-80% hacking fractions).
ADAPTOOD: 分布外 ECG 時系列モデルの不確実性を考慮した微調整
トレーニングに使用されるデータ サンプルは、微調整や展開中に発生するデータ サンプルとは異なることが多く、ML モデルは有望ですが、注釈付きの小さなデータセットしか利用できない場合、そのパフォーマンスは依然として限定的です。さまざまなセンサー、母集団、アプリケーション設定によって引き起こされる分布の変化では、パフォーマンスが低下することがよくあります。事前トレーニングは役立ちますが、現実世界の設定ではモデルが分布外 (OOD) データに頻繁に遭遇し、堅牢性の低下につながります。既存の適応手法は通常、固定的な分布シフトを想定しており、複数の種類や重大度が発生した場合に困難を伴います。特に、彼らはシフトの重大性を見落としており、たとえば、慣れ親しんだ大規模なデータセットへの適応を、新しいタスクを伴う小規模なデータセットへの適応と同じように扱うため、一般化が制限されます。これに対処するために、データの不確実性を活用して分布シフトの深刻度を定量化し、時系列の微調整をガイドする新しいフレームワークである ADAPTOOD を提案します。この不確実性は、ターゲット展開分布からのサンプルがトレーニング前の分布からどれだけ強く逸脱しているかを測定し、OOD 重大度の直接的なシグナルを提供します。私たちのフレームワークは、この不確実性を低ランクのモデルの更新と適応型ハイパーパラメーターの最適化と組み合わせて、適応を改善します。 ADAPTOOD は、OOD タスクにおいて既存の方法よりも最大 7% 高い精度と 12.9% 高い精度を達成し、分布シフトの重大度が増加しても強力なパフォーマンスを維持することを示します。
原文 (English)
ADAPTOOD: Uncertainty-Aware Fine-Tuning for Out-of-Distribution ECG Time Series Models
Data samples used for training often differ from those encountered during fine-tuning and deployment, and while ML models show promise, their performance remains limited when only small annotated datasets are available. Performance often degrades under distribution shifts caused by diverse sensors, populations, and application settings. Although pre-training helps, models frequently encounter out-of-distribution (OOD) data in real-world settings, leading to reduced robustness. Existing adaptation methods usually assume fixed distribution shifts and struggle when multiple types or severities occur. In particular, they overlook shift severity, for example treating adaptation to a large familiar dataset the same as adaptation to a small dataset with a new task, which limits generalisation. To address this, we propose ADAPTOOD, a novel framework that leverages data uncertainty to quantify distribution shift severity and guide fine-tuning for time series. This uncertainty measures how strongly samples from the target deployment distribution deviate from the pre-training distribution, providing a direct signal of OOD severity. Our framework combines this uncertainty with low-rank model updates and adaptive hyperparameter optimisation to improve adaptation. We show that ADAPTOOD achieves up to 7% higher accuracy and 12.9% higher precision than existing methods in OOD tasks, maintaining strong performance as distribution shift severity increases.
ニューロンを使用しないスマートな交通 -- 表形式の強化学習による公平な地下鉄ネットワークの拡張
私たちは、交通需要を満たすために地下鉄システムを拡張することに焦点を当てた交通ネットワーク設計問題 (TNDP) のサブセットである地下鉄ネットワーク拡張問題 (MNEP) に取り組みます。従来の方法は、検索スペースを削減するために専門家が定義した制約を必要とする、正確でヒューリスティックなアプローチに依存しています。最近、複雑な逐次意思決定プロセスにおける有効性により、深層強化学習 (Deep RL) が登場しましたが、依然として計算コストと環境コストが高く、解釈するには追加のエンジニアリングが必要です。 MNEP 問題は、Deep RL 手法を必要としないほど十分に小さいことを示します。 MNEP を非マルコフ報酬決定プロセス (NMRDP) として再定式化し、表形式の RL を使用して、大幅に少ないトレーニング エピソードで同様のパフォーマンスを達成し、さらに優れた解釈可能性を提供します。さらに、報酬関数に社会的公平性の基準を組み込み、効率と公平性に重点を置き、手法の多用途性を強調しています。西安とアムステルダムの現実世界の設定で評価された私たちの方法は、Deep RL との競争力を維持しながら、総エピソード数を平均 18 分の 1、総二酸化炭素排出量を 12 分の 1 削減します。このアプローチは、他の組み合わせ最適化問題への潜在的なアプリケーションを備えた、複製可能、モジュール式、解釈可能な、リソース効率の高いソリューションを提供します。
原文 (English)
Smart Transportation Without Neurons -- Fair Metro Network Expansion with Tabular Reinforcement Learning
We tackle the Metro Network Expansion Problem (MNEP), a subset of the Transport Network Design Problem (TNDP), which focuses on expanding metro systems to satisfy travel demand. Traditional methods rely on exact and heuristic approaches that require expert-defined constraints to reduce the search space. Recently, deep reinforcement learning (Deep RL) has emerged due to its effectiveness in complex sequential decision-making processes-it remains, however, computationally expensive, environmentally costly, and requires additional engineering to interpret. We show that MNEP problems are small enough to not require Deep RL methods. Reformulating the MNEP as a Non-Markovian Rewards Decision Process (NMRDP), we use tabular RL to achieve similar performance with significantly fewer training episodes, additionally offering greater interpretability. Additionally, we incorporate social equity criteria into the reward functions, focusing on efficiency and fairness, highlighting the versatility of our method. Evaluated in real-world settings-Xi'an and Amsterdam-our method reduces total episodes by a factor of 18 and total carbon emissions by a factor of 12 on average, while remaining competitive with Deep RL. This approach offers a replicable, modular, interpretable, and resource-efficient solution with potential applications to other combinatorial optimization problems.
MimeLens: バイナリ フラグメントの位置に依存しないコンテンツ タイプの検出
ファイル タイプの分類は、マルウェアのトリアージ、フォレンジック カービング、パケット インスペクション、ストレージ インデックス作成などの多くのワークフローの基礎となります。 Google の Magika などの学習型システムは、既知のオフセットでのファイル全体へのアクセスを前提としているため、単一パケットのペイロード、ヘッダーのない彫刻されたフラグメント、ランダムなディスク ブロック、またはチャンク アップロードなど、これらのタスクの多くが実際に生成する入力を中断します。 MimeLens は、標準コンテキストおよびショートコンテキストのバリアントで、各ファイル内の均一にランダムなオフセットでサンプリングされたウィンドウからのバイナリ コンテンツで事前トレーニングされた小さな BERT スタイル エンコーダ ファミリであり、特権的なファイル先頭位置はありません。バイト チャンクはファイル内のどこからでも入ります。ヘッダーも固定サイズも必要ありません。 libmagic の 125 の MIME ラベルの 1 つが出力されます。完全なファイルのクリーンヘッドでは、MimeLens は、libmagic ラベル付きデータで +10.7 pp のトップ 1 で Magika v1.1 を上回り、単一のミッドストリーム UDP パケットから、ランダムなミッドファイル ディスク ブロック上で libmagic と Magika の 2 倍以上の正確さで、Magicka ができない場所を分類し続けます。コストは遅延です。MimeLens は、消費者向け GPU やバッチでは同等ですが、CPU 上では Magika よりもサンプルごとにおよそ 1 ~ 2 桁遅く実行されます。トレーニングされたすべてのチェックポイントは、Hugging Face (mjbommar/mimelens-001-*) でリリースされます。
原文 (English)
MimeLens: Position-Agnostic Content-Type Detection for Binary Fragments
File-type classification underlies many workflows like malware triage, forensic carving, packet inspection, and storage indexing. Learned systems such as Google's Magika assume whole-file access at a known offset, so they break on the inputs many of these tasks actually produce, like a single packet payload, a header-less carved fragment, a random disk block, or a chunked upload. We introduce MimeLens, a family of small BERT-style encoders pretrained on binary content from windows sampled at a uniformly random offset within each file, with no privileged head-of-file position, in standard- and short-context variants. A byte chunk goes in from anywhere in a file, no header needed and no fixed size; out comes one of libmagic's 125 MIME labels. On the clean head of complete files, MimeLens beats Magika v1.1 by +10.7 pp top-1 on libmagic-labeled data, and it keeps classifying where Magika cannot: from a single mid-stream UDP packet, and more than twice as accurately as libmagic and Magika on random mid-file disk blocks. The cost is latency: MimeLens runs roughly one to two orders of magnitude slower per sample on CPU than Magika, though it matches on consumer GPUs or in batch. All trained checkpoints are released on Hugging Face (mjbommar/mimelens-001-*).
ドメインとモデルにわたる AI 生成テキスト検出における言語的特徴の系統的分析
解釈可能な言語特徴は、特に専門家でないユーザーにとって、特定のテキストが機械生成のように見える理由を説明するための有望なアプローチを提供します。ただし、LLM で生成されたテキストを特徴が確実に示しているという既存の調査結果は、特徴セット、モデル、テキスト ドメイン全体で断片化されたままです。このギャップに対処するために、AI が生成したテキストを特徴付けるための言語信号の堅牢性を評価する大規模な実証研究を実施します。私たちの分析では、クロスモデルおよびクロスドメイン一般化設定の下で、27 の LLM と 10 のテキスト ドメインからの出力にわたる 284 の解釈可能な言語特徴をカバーしています。言語的特徴のみに基づく分類器が、AI によって生成されたテキストと人間が書いたテキストを確実に区別できることを示します。ただし、これまでに提案された指標の多くは、語彙の豊富さの尺度を除いて、コンテキストに強く依存することが証明されており、モデル ファミリとテキスト ドメイン全体にわたって堅牢なシグナルのままです。これらの結果は、どの言語信号がコンテキスト全体で一般化するかを示し、AI 生成言語のより信頼性が高く解釈可能な分析の基盤を提供します。
原文 (English)
A Systematic Analysis of Linguistic Features in AI-Generated Text Detection Across Domains and Models
Interpretable linguistic features offer a promising approach for explaining why a given text appears machine-generated, particularly for non-expert users. However, existing findings on which features reliably indicate LLM-generated text remain fragmented across feature sets, models, and text domains. To address this gap, we conduct a large-scale empirical study assessing the robustness of linguistic signals for characterizing AI-generated text. Our analysis covers 284 interpretable linguistic features across outputs from 27 LLMs and ten text domains under cross-model and cross-domain generalization settings. We show that classifiers based solely on linguistic features can reliably distinguish AI-generated from human-written text. However, many previously proposed indicators prove strongly context-dependent, with the exception of measures of lexical richness, which remain robust signals across model families and text domains. These results demonstrate which linguistic signals generalize across contexts and provide a foundation for more reliable, interpretable analyses of AI-generated language.
強化学習における正確なアンラーニング
私たちは強化学習における \emph{正確なアンラーニング} の問題を定式化します。その目的は、削除リクエストに応じてユーザーのデータを削除できる効率的なフレームワークを設計することです。つまり、アンラーニング後のオンライン学習者の出力は、削除されたユーザーが学習者と対話しなかった場合に生成される出力と \emph{区別できません}。 $\rho >0$ の場合、 $\rho$-TV 安定で、期待される計算コストがゼロから再学習する計算コストの $\rho \sqrt{\ln T}$ の一部にすぎない正確な非学習手順をサポートする強化学習 (RL) アルゴリズムが存在することを示します。我々は、表形式マルコフ決定プロセス(MDP)用の $\rho$-TV-stable RL アルゴリズムを構築します。これは $\mathcal{O}(H^2 \sqrt{SAT} + H^3 S^2 A + {H^{2.5} S^2 A}/{\rho})$ のリグレス限界を達成します。ここで、$S、A、H$、$T$ は状態数、アクション数、エピソード ホライズンを示します。とエピソード数がそれぞれ異なります。また、$\rho$-TV-stable RL アルゴリズムに対して $\Omega(H\sqrt{\!SAT}\! +\! {SAH}/{\rho})$ の下限も確立し、アルゴリズムがほぼミニマックス最適であることを示しています。
原文 (English)
Exact Unlearning in Reinforcement Learning
We formulate the problem of \emph{exact unlearning} in reinforcement learning, where the goal is to design an efficient framework that enables the removal of any user's data upon deletion request, i.e., the online learner's output after unlearning is \emph{indistinguishable} from what would have been produced had the deleted user never interacted with the learner. For any $\rho >0$, we show that there exists a reinforcement learning (RL) algorithm that is $\rho$-TV-stable and supports an exact unlearning procedure whose expected computational cost is only a $\rho \sqrt{\ln T}$ fraction of the computational cost of retraining from scratch. We construct such a $\rho$-TV-stable RL algorithm for tabular Markov decision processes (MDPs), which achieves a regret bound of $\mathcal{O}(H^2 \sqrt{SAT} + H^3 S^2 A + {H^{2.5} S^2 A}/{\rho})$, where $S, A, H$, and $T$ denote the number of states, the number of actions, the episode horizon, and the number of episodes, respectively. We also establish a lower bound of $\Omega(H\sqrt{\!SAT}\! +\! {SAH}/{\rho})$ for $\rho$-TV-stable RL algorithms, showing that our algorithm is nearly minimax optimal.
2つのアドバンテージフィールド
オフラインの目標条件付き強化学習では、長期的な到達可能性の推定とローカル アクションの比較の両方が必要です。デュアル目標表現は、グローバルな目標の到達可能性を取得する値フィールドを提供しますが、特定の状態でどのアクションが優先されるべきかを直接指定するものではありません。我々は、双線形二重値モデルをローカルアドバンテージ信号に変えるポリシー抽出手法であるデュアルアドバンテージフィールドを提案します。双線形双対パラメータ化では、目標の埋め込みは状態表現に対する値フィールドの勾配です。 DAF は、アクションによって引き起こされる割り引かれたフィーチャの変位を予測し、この変位と目標の方向との整合性によってアクションをスコア化するアクション効果モデルを学習します。実現可能なケースでは、このスコアは目標条件付きベルマンアドバンテージに等しく、標準的なローカル政策改善保証が得られます。 OGBench の移動、操作、パズルのタスクでは、DAF は集計 RLiable メトリクスを改善し、局所的に正しいアクションが最終目標に向かう直接的な動きとは異なる設定で強力にパフォーマンスを発揮します。
原文 (English)
Dual Advantage Fields
Offline goal-conditioned reinforcement learning requires both long-horizon reachability estimates and local action comparisons. Dual goal representations provide value fields that capture global goal reachability, but they do not directly specify which action should be preferred at a given state. We propose Dual Advantage Fields, a policy-extraction method that turns a bilinear dual value model into a local advantage signal. Under bilinear dual parameterization, the goal embedding is the gradient of the value field with respect to the state representation. DAF learns an action-effect model that predicts the discounted feature displacement induced by an action and scores actions by the alignment between this displacement and the goal direction. In the realizable case, this score equals the goal-conditioned Bellman advantage, yielding a standard local policy-improvement guarantee. On OGBench locomotion, manipulation, and puzzle tasks, DAF improves aggregate RLiable metrics and performs strongly in settings where locally correct actions differ from direct movement toward the final goal.
CTF4Science Lorenz Challenge のメトリクスを意識したハイブリッド予測
CTF4Science Lorenz チャレンジに対するアプローチについて説明します。このベンチマークは、9 つのタスク ペアにわたって、短期予測、長時間分布マッチング、軌道再構築を組み合わせたベンチマークです。重要な発見は、単一のモデル ファミリがすべての指標を支配していないということです。代わりに、各計量ファミリーに異なる予測子を割り当てる計量認識ハイブリッド システムを構築しました。(1) 全軌道再構築のための合成事前トレーニング済みデノイザー、(2) 最初の 20 予測ステップに対するローレンツ ODE フィッティングと軌道シューティング、(3) 長時間評価のための合成ローレンツ ライブラリを使用したヒストグラム テール置換。このシステム ファミリからの代表的な成熟した投稿は、公開リーダーボードで 83.83551 のスコアを獲得し、同じアイデアの小規模なフォローアップ スタックは 83.85529 に達しました。私たちがよりクリーンな中間システムに焦点を当てるのは、このシステムが完全なメソッドを捕捉しつつ、再現と分析が容易な一方で、最終的な提出は同じバックボーンの保守的な拡張として理解できるためです。
原文 (English)
Metric-Aware Hybrid Forecasting for the CTF4Science Lorenz Challenge
We describe our approach to the CTF4Science Lorenz challenge, a benchmark that mixes short-horizon forecasting, long-time distribution matching, and trajectory reconstruction across nine task pairs. The key discovery is that no single model family dominated all metrics. Instead, we built a metric-aware hybrid system that assigned a different predictor to each metric family: (1) synthetic-pretrained denoisers for full-trajectory reconstruction, (2) Lorenz ODE fitting and trajectory shooting for the first 20 forecast steps, and (3) histogram-tail substitution using synthetic Lorenz libraries for long-time evaluation. A representative mature submission from this system family scored 83.83551 on the public leaderboard, and a small follow-up stack of the same ideas reached 83.85529. We focus on the cleaner intermediate system because it captures the full method while remaining simple enough to reproduce and analyze, while the final submission can be understood as a conservative extension of the same backbone.
公証されたエージェント: AI エージェントのアクションに対する受信者が証明した機密受領書
現在の AI エージェントの可観測性は構造的に危険にさらされています。アクティビティ ログを生成するエンティティは、アクティビティが記録されるエンティティと同じです。侵害されたエージェントまたはバグのあるエージェントは、自身のトレースを省略、変更、または捏造する可能性があり、エージェントを実行するオペレータには改ざんを検出する独自の方法がありません。私たちは、信頼境界を反転することでこれを解決するプロトコルのクラスを提案します。エージェントの呼び出しを受信するサービスは、独自のキーを使用して観察した内容の受信に署名し、エージェントの所有者に対して受信を暗号化し、それを公開の透明性ログに公開します。所有者は、エージェントやそのオペレーターを信頼せずに、改ざん証拠の証跡を再構築します。このクラスを Sello としてインスタンス化します。これは、現在のシステムには存在しない 4 つのプロパティを組み合わせたプロトコルです。(P1) 受信者側の署名、(P2) JWS 経由で認可トークンにバインドされた所有者公開鍵への HPKE 暗号化、(P3) 証人署名付きマークル ログへの公開、(P4) トークン参照による所有者側の検出です。私たちはプロトコルを説明し、エージェントとそのオペレーターを制御する敵対者の下でそのセキュリティを分析し、暗号操作のマイクロベンチマークを提示し、隣接する受信プロトコル作業 (Signet、AgentROA、Agent Passport System、draft-farley-acta、SCITT) の中に Sello を位置づけます。抑制攻撃、サービスの共謀、採用インセンティブの問題などの既知の制限について説明します。
原文 (English)
Notarized Agents: Receiver-Attested Confidential Receipts for AI Agent Actions
Current AI agent observability is structurally compromised: the entity producing the activity log is the same entity whose activity is being logged. A compromised or buggy agent can omit, alter, or fabricate its own traces, and the operator running the agent has no independent way to detect tampering. We propose a class of protocols that resolves this by inverting the trust boundary: the service that receives an agent's call signs a receipt of what it observed using its own key, encrypts the receipt to the agent's owner, and publishes it to a public transparency log. The owner reconstructs a tamper-evident trail without trusting the agent or its operator. We instantiate the class as Sello, a protocol combining four properties absent in any current system: (P1) receiver-side signing, (P2) HPKE encryption to an owner public key bound to the authorization token via JWS, (P3) publication to a witness-cosigned Merkle log, and (P4) owner-side discovery by token reference. We describe the protocol, analyze its security under an adversary that controls the agent and its operator, present microbenchmarks of the cryptographic operations, and situate Sello among adjacent receipt-protocol work (Signet, AgentROA, Agent Passport System, draft-farley-acta, SCITT). We discuss known limitations including the suppression attack, service collusion, and the adoption-incentive problem.
DetectZoo: テキスト、オーディオ、画像モダリティにわたる AI 生成コンテンツ検出のための統合ツールキット
生成モデルの人気と能力の高まりにより、人間が生成したコンテンツと機械が生成したコンテンツの区別がなくなり、テキスト、画像、音声にわたる検出に関する一連の研究が増えています。入手可能な検出器のほとんどは商用ソフトウェアであるか、オープンソースの場合は特注の前処理、評価プロトコル、評価メトリクスを備えた互換性のないコードベースが付属しているため、その採用、公正な比較、再現が非常に困難になっています。この重大なギャップに対処するために、テキスト、オーディオ、画像モダリティにわたる AI 生成コンテンツ検出のための統一インターフェイスを提供するように設計された、この種初の拡張可能なツールキットである DetectZoo を導入します。 DetectZoo は、データの取り込みと前処理からモデルの評価に至るまで、完全な経験的パイプラインを標準化し、最先端の検出器を体系的にベンチマークするための一貫したフレームワークを研究者に提供します。多様な公開データセットとベースライン検出アルゴリズムを単一の統一 API に統合することで、当社のツールキットは厳密で再現可能な評価を容易にします。 DetectZoo は、61 の検出器のリファレンス実装、22 のベンチマーク データセット用のネイティブ ローダー、および共通のインターフェイスを通じて複数のメトリクスを報告する標準化された評価パイプラインを提供します。各検出器は自己完結型ですが、同じインターフェイスからアクセスでき、事前トレーニングされた重みを自動的にキャッシュし、元の公開結果を再現します。 DetectZoo は、マルチモーダル AI フォレンジックの参入障壁を下げ、研究者がドメイン間のパフォーマンスのギャップを特定できるようにし、堅牢で汎用性のある検出技術の開発を加速します。オープンソース リポジトリと包括的なドキュメントは https://github.com/sadjadeb/DetectZoo で公開されており、パッケージは pip install detectzoo 経由でインストールできます。
原文 (English)
DetectZoo: A Unified Toolkit for AI-Generated Content Detection Across Text, Audio, and Image Modalities
The growing popularity and capacity of generative models have eroded the distinction between human and machine-generated content, motivating a growing body of work on detection across text, images, and audio. Most available detectors are either commercial software or, if open-source, come with incompatible codebases with bespoke preprocessing, evaluation protocols, and evaluation metrics, which make their adoption, fair comparison, and reproduction quite difficult. To address this critical gap, we introduce DetectZoo, a first-of-its-kind, extensible toolkit designed to provide a unified interface for AI-generated content detection across text, audio, and image modalities. DetectZoo standardizes the complete empirical pipeline, from data ingestion and preprocessing to model assessment, offering researchers a cohesive framework to benchmark state-of-the-art detectors systematically. By integrating diverse public datasets and baseline detection algorithms under a single, unified API, our toolkit facilitates rigorous and reproducible evaluation. DetectZoo provides reference implementations of 61 detectors, native loaders for 22 benchmark datasets, and a standardized evaluation pipeline that reports multiple metrics through a common interface. Each detector is self-contained yet accessible through the same interface, automatically caches pretrained weights, and reproduces the original published results. DetectZoo lowers the barrier to entry for multi-modal AI forensics, enabling researchers to identify performance gaps across domains and accelerating the development of robust, generalizable detection techniques. The open-source repository and comprehensive documentation are publicly available at https://github.com/sadjadeb/DetectZoo, and the package can be installed via pip install detectzoo.
PerceptTwin: 反復 LLM 計画と検証のためのセマンティック シーンの再構築
シミュレーション環境は、ロボット ポリシーの学習と計画の検証と検証の両方に役立ちます。従来、シミュレーションを作成するプロセスは面倒なものでした。ロボットが動作する個々の環境に合わせてオーダーメイドのシミュレーション環境を作成することは、まったく不可能でした。この研究では、ロボットの認識スタックによって生成されたセマンティック シーン表現から直接インタラクティブ シミュレーションを構築する完全自動パイプラインである PerceptTwin を紹介します。 PerceptTwin は、オープン語彙オブジェクト マップと 3D アセット生成、アフォーダンス予測、および常識的な条件チェックを組み合わせます。これらのインタラクティブなシミュレーションを使用すると、ロボット ハードウェアで実行される前に計画を検証し、改良することができます。 AI 調整の文献から借用して、計画の正確さと人間の好みとの調整を検証する LLM ジャッジも紹介します。実験では、PerceptTwin のフィードバックにより、LLM プランナーが計画を改良し、安全性を強化し、有害なブラックボックス プロンプト攻撃に抵抗できることが示されています。私たちの一連のタスクでは、PerceptTwin により、GPT5、GPT5Mini、および GPT5Nano プランナーの計画の成功率が平均約 39% 向上しました。さらに、PerceptTwin は、スキルの前提条件が満たされていないために失敗した計画について、人間による計画の検証を平均で最大 18% 改善します。私たちの結果は、より安全で信頼性の高いロボット計画の基盤として、ロボットの知覚からのオープンボキャブラリーシーンシミュレーションの可能性を実証しています。
原文 (English)
PerceptTwin: Semantic Scene Reconstruction for Iterative LLM Planning and Verification
Simulation environments are useful for both robot policy learning and planning verification and validation. Traditionally, the process of creating a simulation was onerous. Creating a bespoke simulation environment for each individual environment that a robot would operate in was simply infeasible. In this work, we introduce PerceptTwin, a fully automatic pipeline that constructs interactive simulations directly from semantic scene representations produced by a robot's perception stack. PerceptTwin combines open-vocabulary object maps with 3D asset generation, affordance prediction, and commonsense condition checking. These interactive simulations can be used to validate and refine plans before they are executed on the robot hardware. Borrowing from the AI alignment literature, we also introduce an LLM judge that verifies plan correctness and alignment with human preferences. Experiments show that PerceptTwin feedback allows LLM planners to refine plans, enhance safety, and resist harmful black-box prompting attacks. In our suite of tasks, PerceptTwin improves plan success by an average of approximately 39% for GPT5, GPT5Mini, and GPT5Nano planners. Additionally, PerceptTwin also improves human plan verification by up to 18% on average for plans that fail due to unfilled skill preconditions. Our results demonstrate the potential of open-vocabulary scene simulation from robot perception as a foundation for safer, more reliable robot planning.
細胞複合体における増分層コホモロジー: 境界のあるローカル ジオメトリでの O(1)-in-n 遅延編集処理
我々は、有限次元の細胞層を備えた動的に進化する1次元細胞複合体上の最初の層コホモロジー $H^1(X; \mathcal{F})$ を増分的に維持するためのアルゴリズムフレームワークを提案します。共有境界行列の因数分解による $H^1$ の古典的な計算には $O(n^3)$ の時間が必要です。 $m$ の編集のストリームによって複雑さが進化すると、各編集後の完全な再計算には $O(mn^3)$ のコストがかかります。有界のローカル ジオメトリの仮定 (有界セル サイズ $v_{\max}$、有界ストーク寸法 $d$、有界神経次数 $D$) の下では、各編集 (頂点挿入、エッジ挿入、制限マップ更新) は、ローカル共有境界ブロックの有界セットにのみ影響します。したがって、このアルゴリズムは、複素数の合計サイズ $n$ に対して ($n$ から独立した定数として扱われるローカル ジオメトリ パラメーター $v_{\max}$、$d$、および $D$ のコスト多項式を使用して) 遅延ストリーミング編集を $O(1)$ 時間で処理し、ローカル固有ソルブと Mayer-Vietoris グローバル アセンブリを同期ポイント (フラッシュ) まで遅らせます。同期時に、維持される状態は、分割された層モデルの対応するバッチ アセンブリと一致します。すべてのバッチ検証された実行でゼロの測定ドリフトが観察されました ($V = 10^6$ による)。また、セル分解のための償却 $O(|E|)$ ストリーミング構造を与え、分割されていない非自明な層 ($d \geq 2$、非同一性制限マップ) が同じ局所性を認めないと主張する敵対的代数 RAM バリアについて議論します。最大 $5 \times 10^6$ の頂点と $1.7 \times 10^7$ のストリーミング編集を使用した Barabasi-Albert グラフの実験では、編集ごとの遅延更新レイテンシーの中央値が 35 $\mu$s (フラッシュを除く) であることがわかりました。クエリ時間 (同期時のグローバル アセンブリ) は、実装されたフルトラバーサル パスのフラッシュごとに $O(n)$ です。正確な同期コストは別途報告されます。
原文 (English)
Incremental Sheaf Cohomology on Cellular Complexes: O(1)-in-n Lazy Edit Processing under Bounded Local Geometry
We present an algorithmic framework for incremental maintenance of first sheaf cohomology $H^1(X; \mathcal{F})$ on dynamically evolving 1-dimensional cellular complexes equipped with finite-dimensional cellular sheaves. The classical computation of $H^1$ via factorization of the coboundary matrix requires $O(n^3)$ time; when the complex evolves with a stream of $m$ edits, full recomputation after each edit costs $O(mn^3)$. Under a bounded local geometry assumption -- bounded cell size $v_{\max}$, bounded stalk dimension $d$, and bounded nerve degree $D$ -- each edit (vertex insertion, edge insertion, restriction map update) affects only a bounded set of local coboundary blocks. The algorithm therefore processes lazy streaming edits in $O(1)$ time with respect to the total complex size $n$ (with cost polynomial in the local geometry parameters $v_{\max}$, $d$, and $D$, which are treated as constants independent of $n$), deferring local eigensolves and Mayer-Vietoris global assembly to synchronization points (Flush). At synchronization, the maintained state agrees with the corresponding batch assembly of the partitioned sheaf model; we observe zero measured drift in all batch-verified runs (through $V = 10^6$). We also give an amortized $O(|E|)$ streaming construction for the cellular decomposition and discuss an adversarial algebraic-RAM barrier arguing that unpartitioned non-trivial sheaves ($d \geq 2$, non-identity restriction maps) do not admit the same locality. Experiments on Barabasi-Albert graphs with up to $5 \times 10^6$ vertices and $1.7 \times 10^7$ streaming edits show 35 $\mu$s median lazy per-edit update latency (excluding flush); query time (global assembly at synchronization) is $O(n)$ per flush in the implemented full-traversal path. Exact synchronization costs are reported separately.
MM-BizRAG: 汎用エンタープライズ Q&A 向けのマルチモーダル検索拡張生成の再考
マルチモーダル検索拡張生成 (MM-RAG) の最近の進歩は、最小限の解析に移行し、検索埋め込みの生成と回答の生成にはページレベルの画像に依存しています。この傾向は効率的ではありますが、複雑な企業ドキュメント内の豊富で構造化された情報の明示的な処理を無視することが多く、その代わりに、そのような構造を暗黙的に捕捉する事前トレーニング済みの埋め込みまたはビジョン言語モデルに依存します。この作業では、より直接的なアプローチを採用しています。MM-BizRAG は、方向固有の取り込みパイプラインを通じてドキュメントを動的にルーティングするドキュメント構造認識分割を介してドキュメント構造をプロアクティブに抽出および表現し、垂直方向に構造化されたドキュメント (レポートなど) には明示的なレイアウト認識解析を適用し、水平方向に構造化されたドキュメント (スライド デッキなど) には全体的なページ レベルの表現を適用します。プレースホルダーベースの位置調整を備えた統合された LLM 駆動のアーティファクト変換パイプラインにより、自然な読み取り順序が維持される一方、推論時のマルチモーダル アセンブリにより検索表現が生成コンテキストから切り離され、微調整を必要とせずに、より豊富で根拠のある回答が可能になります。大規模で異種混合のエンタープライズ データセットと 2 つの公開ベンチマーク (SlideVQA および FinRAGBench-V) での実験を通じて、MM-BizRAG は常に最先端のビジョン中心のベースラインを最大 32% ポイント上回るパフォーマンスを示し、特にレポート スタイルのレイアウトで大幅な向上を実現しました。さらに、人間によるより強力な調整を実現しながら、RAGChecker のコストを半減する、きめ細かい生成呼び出しのためのシングルコール LLM ジャッジ メトリクスである FastRAGEval を導入します。
原文 (English)
MM-BizRAG: Rethinking Multimodal Retrieval-Augmented Generation for General Purpose Enterprise Q&A
Recent advances in multimodal retrieval-augmented generation (MM-RAG) have shifted toward minimal parsing, relying on page-level images for producing retriever embeddings and for answer generation. While efficient, this trend often neglects explicit handling of the rich, structured information in complex enterprise documents, instead depending on pre-trained embeddings or vision-language models to implicitly capture such structure. In this work, we take a more direct approach: MM-BizRAG proactively extracts and represents document structure via a document structure-aware split that dynamically routes documents through orientation-specific ingestion pipelines, applying explicit layout-aware parsing for vertically structured documents (e.g., reports) and holistic page-level representations for horizontally structured documents (e.g., slide decks). A unified LLM-driven artifact transformation pipeline with placeholder-based positional alignment preserves natural reading order, while inference-time multimodal assembly decouples retrieval representations from generation context, enabling richer, more grounded answers without any finetuning requirement. Through experiments on a large, heterogeneous enterprise dataset and two public benchmarks (SlideVQA and FinRAGBench-V), MM-BizRAG consistently outperforms state-of-the-art vision-centric baselines by up to 32% points, with especially strong gains on report-style layouts. Furthermore, we introduce FastRAGEval, a single-call LLM Judge metric for fine-grained generative recall that halves RAGChecker's cost while achieving stronger human alignment.
高速拡散言語モデルのデコードをサポートするトークンの公開
離散拡散言語モデルは、複数のマスクされた位置を並行して更新することでテキストを効率的に生成できますが、この並行性により品質と遅延のトレードオフが生じます。積極的なデコードでは相互に依存するトークンのコミットが早すぎる可能性がありますが、保守的なデコードでは多くのノイズ除去手順が必要になります。既存の方法では、信頼性または依存性の基準を使用して、どのトークンを公開しても安全であるかを判断することで、この緊張に対処しています。ただし、安全でないコミットを回避しても、残りのマスクされたシーケンスのデコードが容易になるとは限りません。不確実なトークンがマスクされたトークンに依存し、ノイズ除去ステップのボトルネックになる可能性があるためです。私たちは、拡散言語モデルの既存の並列デコード戦略の上に追加できる、トレーニング不要のモジュールである AXON を提案します。 AXON は、ベース デコーダを置き換えるのではなく、残りの不確実なマスクされたトークンを監視し、現在の状態が追加のコンテキストが必要であることを示唆する場合にのみ介入します。次に、どのトークンを公開するのが最も安全であるかという基準を、どの信頼できる公開が後のノイズ除去を最もよくサポートするかという基準に変更します。 AXON は、注意、不確実性、および信頼性のシグナルを使用して、不確実な位置が注目するアンカー、つまり不確実な位置が注目する自信のあるマスクされたトークンを選択します。複数の拡散言語モデルにわたる推論とコード生成のベンチマークに関する実験では、AXON が既存の並列デコーダーの品質と遅延のトレードオフを改善し、多くの場合、精度を維持または向上させながら関数評価の数を削減することが示されています。
原文 (English)
Supportive Token Revealing for Fast Diffusion Language Model Decoding
Discrete diffusion language models can generate text efficiently by updating multiple masked positions in parallel, but this parallelism introduces a quality-latency trade-off. Aggressive decoding may commit mutually dependent tokens too early, while conservative decoding requires many denoising steps. Existing methods address this tension by deciding which tokens are safe to reveal using confidence or dependency criteria. However, avoiding unsafe commits does not necessarily make the remaining masked sequence easy to decode, since uncertain tokens may depend on masked tokens, creating a bottleneck for denoising steps. We propose AXON, a training-free module that can be added on top of existing parallel decoding strategies for diffusion language models. Rather than replacing the base decoder, AXON monitors the remaining uncertain masked tokens and intervenes only when their current state suggests that additional context is needed. It then shifts the criterion from which tokens are safest to reveal to which confident reveals would best support later denoising. AXON selects anchors, confident masked tokens that uncertain positions attend to, using attention, uncertainty, and confidence signals. Experiments on reasoning and code-generation benchmarks across multiple diffusion language models show that AXON improves the quality-latency trade-off of existing parallel decoders, often reducing the number of function evaluations while maintaining or improving accuracy.
Recover-LoRA for Aggressive Quantization: Reclaiming Accuracy in 2-Bit Language Models via Low-Rank Adaptation with Knowledge Distillation on Synthetic Data
Aggressive weight quantization to 2-bit precision offers substantial throughput and memory gains for large language model (LLM) inference,…
Overview of the EReL@MIR 2025 Multimodal Document Retrieval Challenge (Track 1)
Retrieval over visually-rich documents, pages that interleave text with figures, tables, and charts, is essential for multimodal retrieval-…
Can I Take Another Dose? Evaluating LLM Decision-Making Under Temporal Uncertainty in OTC Dosing QA
Large language models (LLMs) are increasingly used for everyday health questions, including whether a user can safely take another dose of…
Instant-Fold: In-Context Imitation Learning for Deformable Object Manipulation
Deformable object manipulation (DOM) is challenging due to high-dimensional, partially observable states that evolve through long-horizon,…
StandardE2E: A Unified Framework for End-to-End Autonomous Driving Datasets
Autonomous driving has shifted from modular perception-prediction-planning stacks toward end-to-end (E2E) models that map sensor inputs dir…
From Ticks to Flows: Dynamics of Neural Reinforcement Learning in Continuous Environments
We present a novel theoretical framework for deep reinforcement learning (RL) in continuous environments by modeling the problem as a conti…
The Loss Is Not Enough: Sampling Conditions and Inductive Bias in Contrastive Representation Learning
Contrastive learning has become a leading paradigm for self-supervised representation learning, yet the conditions under which it recovers…
Sparse Mixture-of-Experts Reward Models Learn Interpretable and Specialized Experts for Personalized Preference Modeling
Preference modeling plays a central role in reinforcement learning from human feedback (RLHF), enabling large language models (LLMs) to ali…
Scaling Novel Graph Generation via Lightweight Structure-Guided Autoregressive Models
Generating realistic and diverse graphs is a key problem in machine learning, with applications in molecular discovery, circuit design, cyb…
Anycast Performance in Context
IP anycast lets a service advertise one address from many physical sites, leaving BGP to map each client to a site. It is central to the DN…
OpenRFM: Dissecting Relational In-Context Learning
Relational Foundation Models (RFMs) promise a single pre-trained predictor that, given any relational database, returns predictions in one…
Measuring What Matters: Synthetic Benchmarks for Concept Bottleneck Models
Concept bottleneck models predict outcomes from high-level concepts detected in inputs. Although concepts provide a simple way to reap bene…
A Geometric Characterization of the Stationary Plateau for Two-Layer Neural Networks
We investigate the geometric structure of stationary plateaus that arise in the loss landscape of two-layer neural networks with smooth act…
Generalizable Multi-Task Learning for Wireless Networks Using Prompt Decision Transformers
Future wireless networks demand rapid adaptation to highly heterogeneous environments and dynamic task configurations, necessitating a shif…
From Untrusted Input to Trusted Memory: A Systematic Study of Memory Poisoning Attacks in LLM Agents
Memory is a core component of AI agents, enabling them to accumulate knowledge across interactions and improve performance. However, persis…
Expectations vs. Realities: The Cost of MSE-Optimal Forecasting Under Conditional Uncertainty
Multi-step time series forecasting (MSF) is commonly evaluated using point-wise error metrics such as mean squared error (MSE), implicitly…
HYolo: An Intelligent IoT-Based Object Detection System Using Hypergraph Learning
This paper presents HYolo, an intelligent IoT-based object detection framework that integrates hypergraph learning into the YOLO architectu…
MorphoQuant: Modality-Aware Quantization for Omni-modal Large Language Models
Conventional Post-Training Quantization (PTQ) methods struggle with 4-bit Omni-modal Large Language Models (OLLMs) due to the extreme distr…
Multi-Granularity 3D Kidney Lesion Characterization from CT Volumes
Radiology reports describe kidney lesions by type, size, enhancement, and attenuation, yet existing 3D methods predict only at the patient…
Selective Coupling of Decoupled Informative Regions: Masked Attention Alignment for Data-Free Quantization of Vision Transformers
Data-Free Quantization (DFQ) addresses data security concerns by synthesizing samples, without accessing real data. It has garnered increas…
DSIRM: Learning Query-Bridged Discrete Semantic Identifiers for E-commerce Relevance Modeling
Despite rapid progress of continuous embeddings for e-commerce search relevance, a long-standing open problem is the difficulty in capturin…
From Symbolic to Geometric: Enabling Spatial Reasoning in Large Language Models
Recent large language models (LLMs) often appear to exhibit spatial reasoning ability; however, this capability is largely \emph{symbolic},…
LCSHBench: A Multilingual, Consensus-Grounded Benchmark for Library of Congress Subject Heading Assignment
Automated subject cataloging assigns controlledvocabulary headings to bibliographic records, but LCSH has no standard public benchmark. We…
Rethinking Sales Lead Scoring with LLM-based Hierarchical Preference Ranking
Sales lead conversion in high-stakes domains (e.g., automotive, real estate) differs fundamentally from e-commerce recommendation due to pr…
TITAN-FedAnil+: Trust-Based Adaptive Blockchain Federated Learning for Resource-Constrained Intelligent Enterprises
Federated Learning (FL) has emerged as an effective paradigm for collaborative intelligence while preserving data privacy. However, data he…
Low-Rank Decay for Grokking in Scale-Invariant Transformers: A Spectral-Geometric View
Modern Transformer architectures frequently employ normalization mechanisms such as RMSNorm and Query-Key Normalization, making parts of th…
An Ensembled Latent Factor Model via Differential Evolution and Gradient Descent Optimization
High-dimensional and incomplete (HDI) data are prevalent in many real-world big data scenarios. Latent factor models serve as a common repr…
An Empirical Study of Data Scale, Model Complexity, and Input Modalities in Visual Generalization
Modern deep neural networks usually have large parameter scales and nonlinear hierarchical structures, and they have achieved strong perfor…
L-TGVN: Leveraging Longitudinal Priors for Personalized Rapid MRI
MRI provides excellent soft-tissue contrast without ionizing radiation, but long acquisition times increase patient discomfort while also r…
What If Prompt Injection Never Left? Exploring Cross-Session Stored Prompt Injection in Agentic Systems
Modern agentic systems transform LLMs from session-bounded assistants into stateful systems that persist and evolve shared world state acro…
LoopMoE: Unifying Iterative Computation with Mixture-of-Experts for Language Modeling
Mixture-of-Experts (MoE) and looped architectures scale models along two orthogonal axes, namely parameter capacity and effective depth. Ho…
MemoryDocDataSet: A Benchmark for Joint Conversational Memory and Long Document Reasoning
AI systems increasingly need to combine two demanding capabilities: navigating multi-session conversation history and performing deep readi…
RowNet: A Memory Transformer for Tabular Regression
Real estate valuation is a structured regression problem in which prices are governed by heterogeneous feature types, sparse regional effec…
Token Rankings are Unforgeable Language Model Signatures
Language model parameters are known to impose unique (to each model) geometric constraints on their logit outputs, which serves as a signat…
CyberGym-E2E: Scalable Real-World Benchmark for AI Agents' End-to-End Cybersecurity Capabilities
AI has the potential to transform cybersecurity by enabling systems that can autonomously detect, analyze, and remediate software vulnerabi…
SePO: Self-Evolving Prompt Agent for System Prompt Optimization
System prompt optimization improves agent behavior without modifying the underlying model, yielding human-readable, model-agnostic instruct…
ParetoPilot: Zero-Surrogate Offline Multi-Objective Optimization via Infer-Perturb-Guide Diffusion
Offline multi-objective optimization (Offline MOO) aims to discover novel Pareto-optimal designs based on static datasets without expensive…
Adaptive Calibration for Fair and Performant Facial Recognition
We introduce Adaptive Calibration (AC), a novel calibration strategy for facial recognition that maps cosine similarity between normalized…
ChessMimic: Per-Rating Transformer Models for Human Move, Clock, and Outcome Prediction in Online Blitz Chess
We present ChessMimic, a system of three small encoder-only transformers - for move, thinking-time, and outcome prediction - conditioned on…
Evaluating Reasoning Fidelity in Visual Text Generation
Recent text-to-image (T2I) models can render highly legible and well-structured text within images, enabling applications including documen…
SFMambaNet: Spectral-Frequency Enhanced Selective State Space Model for Correspondence Pruning
Correspondence pruning aims to identify inliers from an initial set of correspondences. Most existing Graph Neural Network (GNN)-based meth…
Smart Picks in the Dark: Towards Efficient RLVR for Reasoning via Tracing Metacognitive Pivots
Reinforcement learning with verifiable rewards (RLVR) has greatly advanced large reasoning models (LRMs), but it requires timely training o…
Self-Evolving Deep Research via Joint Generation and Evaluation
Large Language Models (LLMs) have become increasingly adopted in daily applications, with deep research standing out as a particularly impo…
GeoMin: Data-Efficient Semi-Supervised RLVR via Geometric Distribution Modeling
Reinforcement learning with verifiable rewards (RLVR) significantly advances LLM reasoning, yet it faces a dilemma: standard supervised sca…
Treat Traffic Like Trees: A Semantic-Preserving Hierarchical Graph-Based Expert Framework for Encrypted Traffic Analysis
Graph-based deep learning methods have been widely employed in encrypted traffic analysis to exploit latent correlations across different g…
ANN Search: Recall What Matters
Approximate nearest neighbor (ANN) search has become a core primitive in information retrieval and modern machine learning tasks, from clas…
Optical-Guided Neural Collapse for SAR Few-Shot Class Incremental Learning
Few-shot class-incremental learning (FSCIL) in synthetic aperture radar imagery presents unique challenges due to severe data scarcity and…
Dynamic Infilling Anchors for Format-Constrained Generation in Diffusion Large Language Models
Diffusion large language models (dLLMs) offer bidirectional attention and parallel generation, enabling them to exploit global context and…
Temporal Order Matters for Agentic Memory: Segment Trees for Long-Horizon Agents
Long-horizon conversational agents need to interact with users through evolving events, tasks, and goals. Such histories are naturally temp…
Rollout-Level Advantage-Prioritized Experience Replay for GRPO
Reinforcement learning from verifiable rewards with GRPO is a standard approach for post-training reasoning LLMs. It remains sample ineffic…
Multi-SPIN: Multi-Access Speculative Inference for Cooperative Token Generation at the Edge
Speculative inference (SPIN) was originally developed as an efficient architecture to accelerate Large Language Models (LLMs). In this work…
Synthetic Personalities: How Well Can LLMs Mimic Individual Respondents Using Socio-Economic Microdata?
LLM-based digital twins promise to scale and accelerate market research, but most published twins are either coarse persona bots conditione…
Ekka: Automated Diagnosis of Silent Errors in LLM Inference
LLM serving frameworks are quickly evolving with a complex software stack and a vast number of optimizations. The rapid development process…
QuBLAST: A Framework for Quantizing Large Language Models with Block-Level Compression Approach and Activation Scaling Strategy
LLMs have become the state-of-the-art algorithms for solving NLP tasks. However, they typically come at huge computational and memory costs…
QO-Bench: Diagnosing Query-Operator-Preserving Retrieval over Typed Event Tuples
Many real-world questions over business, legal, and scientific corpora are natural-language versions of database-style queries over records…
Instance-Level Post Hoc Uncertainty Quantification in Object Detection
Object detection is a safety-critical component of autonomous driving. It is essential to quantify the uncertainty in bounding-box predicti…
Why Muon Outperforms Adam: A Curvature Perspective
Muon improves training efficiency over Adam in large language-model training by about two times, but the local geometric source of this adv…
Learning Long Range Spatio-Temporal Representations over Continuous Time Dynamic Graphs with State Space Models
Continuous-time dynamic graphs (CTDGs) provide a richer framework to capture fine-grained temporal patterns in evolving relational data. Lo…
Real-Time Automatic License Plate Recognition Using YOLOv8, SORT Tracking, and Temporal Data Interpolation
The real-time hardships of video processing seriously limit the usage of Automatic License Plate Recognition (ALPR) with application in dyn…
Graph-Guided Universum Learning in Generalized Eigenvalue Proximal SVMs for Alzheimer's Disease Classification
Early and accurate detection of Alzheimer's disease (AD) is important for timely intervention and disease management. Generalized Eigenvalu…
Enhancing MedSAM with a Lightweight Box Predictor for Medical Image Segmentation
Semantic segmentation in medical imaging is a critical yet challenging task due to data scarcity and high variability across modalities. Wh…
VISTA: Vision-Grounded and Physics-Validated Adaptation of UMI data for VLA Training
Universal Manipulation Interface (UMI) enables scalable real-world robot data collection without hardware-specific teleoperation, yet lever…
CoRe-MoE: Contrastive Reweighted Mixture of Experts for Multi-Terrain Humanoid Locomotion with Gait Adaptation
Humans primarily rely on walking and running to traverse complex terrains, without resorting to unnecessarily complex motion patterns. Simi…
Trace-Mediated Peak Bias: Bridging Temporal Credit Assignment and Cognitive Heuristics in Deep Reinforcement Learning
Temporal credit assignment is central to both biological and artificial intelligence, yet its interaction with non-linear function approxim…
Curvature-aware dynamic precision approach for physics-informed neural networks
Physics-informed neural networks (PINNs) have become a promising framework for simulating partial differential equations (PDEs) by embeddin…
Revisiting Vul-RAG: Reproducibility and Replicability of RAG-based Vulnerability Detection with Open-Weight Models
Large language models (LLMs) have shown strong potential for automated software vulnerability detection, particularly in retrieval-augmente…
TIDE: Proactive Multi-Problem Discovery via Template-Guided Iteration
Agents are widely deployed as assistants over documents, tools, and code. However, they typically act only on explicit user requests, which…
An Empirical Audit of Input Encoders for Multi-Channel Signal Transformers
Transformers consuming multi-channel scalar signals must embed $C$ simultaneous values into one $d_{\text{model}}$-dimensional vector per t…
Archi: Agentic Operations at the CMS Experiment
We present Archi, an open-source, end-to-end framework for scientific collaborations that combines the systematic ingestion and organizatio…
Description-Code Inconsistency in Real-world MCP Servers: Measurement, Detection, and Security Implications
The Model Context Protocol (MCP) has emerged as a critical standard empowering Large Language Models (LLMs) to utilize external tools. In t…
Coarse-to-fine Hierarchical Architecture with Sequential Mamba for Brain Reconstruction
Understanding the relationship between deep visual representations and the human visual system is a fundamental challenge in computational…
Activation Steering of Video Generation Models via Reduced-Order Linear Optimal Control
Text-to-video (T2V) models trained on large-scale web data can generate undesired content, motivating interventions that reduce harmful out…
NoRA: Evaluating Grounded Reasonableness in Visual First-person Normative Action Reasoning
LLMs and agentic systems are increasingly deployed in social environments, making normative competence critical for safe and appropriate be…
Scenario Generation for Risk-Aware Reinforcement Learning with Probably Approximately Safe Guarantees
Guaranteeing safety is critical to the deployment of reinforcement learning (RL) agents in the real-world, especially as policies learned u…
Learning While Acting: A Skill-Enhanced Test-Time Co-Evolution Framework for Online Lifelong Learning Agents
Lifelong learning is essential for Large Language Model (LLM) agents operating in dynamic, interactive environments. However, existing life…
OA-CutMix: Correcting the Label Bias of CutMix
CutMix has become the de facto standard mixing augmentation, yet its label assignment rests on a flawed assumption: The area of the pasted…
Signed Dual Attention: Capturing Signed Dependencies in Time Series Forecasting
Initially developed for natural language processing, Transformer architectures and attention mechanisms are now central to a wide range of…
Uncertainty-Aware End-to-End Co-Design of Neural Network Processors: From Training and Mapping to Fabrication
Designing a neural network processor is an end-to-end co-design problem: network architecture and training budget determine the inference w…
Learning Empirically Admissible Neural Heuristics for Combinatorial Search
Finding optimal solution paths for combinatorial puzzles like the Rubik's Cube, sliding tile puzzles, and Lights Out remains a classical ch…
Abduction Prover in Isabelle/HOL
Proof assistants based on expressive logics suffer limited automation for proof search, raising the cost of formal verification based on pr…
DiverAge: Reliable Pluralistic Face Aging with Cross-Age Identity Relation Guidance
Face aging plays an important role in long-term biometric analysis, cross-age identity verification, and forensic identity analysis. Since…
Provably Auditable and Safe LLM Agents from Human-Authored Ontologies
We introduce the LLM agent architecture Agentic Redux, intended for use with nontrivial problem domains that require linear auditability. U…
'Your AI Text is not Mine': Redefining and Evaluating AI-generated Text Detection under Realistic Assumptions
Although it is generally agreed that AI-generated text poses a broad societal risk, there is no common understanding in the AI-generated te…
Geometry-Aware Distillation for Prompt Tuning Biomedical Vision-Language Models
Current prompt-based and adapter-based tuning of vision-language models (VLMs) is attractive for medical imaging, where clinical data sensi…
Reproducing, Analyzing, and Detecting Reward Hacking in Rubric-Based Reinforcement Learning
Rubric-based reinforcement learning (RL) uses an LLM-as-a-Judge (LaaJ) to score model outputs according to rubrics as rewards. However, pol…
AdaKoop: Efficient Modeling of Nonlinear Dynamics from Nonstationary Data Streams with Koopman Operator Regression
Real-time data analysis requires the ability to accurately and adaptively address nonlinear dynamics in a nonstationary data stream while p…
From Prompt to Process: a Process Taxonomy and Comparative Assessment of Frameworks Supporting AI Software Development Agents
AI tools for programming are no longer just autocomplete or chat assistants: they organize themselves as development frameworks, with proce…
Plan, Watch, Recover: A Benchmark and Architectures for Proactive Procedural Assistance
We envision a proactive multi-modal assistant system which gives users real-time step-by-step guidance on a procedural task, autonomously d…
DeliChess: A Multi-party Dialogue Dataset for Deliberation in Chess Puzzle Solving
Multi-party dialogue is a critical setting for studying collaborative reasoning and decision-making, yet existing datasets rarely focus on…
From Agent Traces to Trust: Evidence Tracing and Execution Provenance in LLM Agents
Large language model (LLM)-based agents increasingly solve complex tasks by interacting with external tools, retrieval systems, memory modu…
SharedRequest: Privacy-Preserving Model-Agnostic Inference for Large Language Models
With the widespread deployment of public large language models (LLMs) such as ChatGPT, protecting user prompt privacy has become an increas…
M$^3$Eval: Multi-Modal Memory Evaluation through Cognitively-Grounded Video Tasks
As multi-modal models advance towards long-form video understanding, memory emerges as a critical capability. Despite substantial efforts i…
DAR: Deontic Reasoning with Agentic Harnesses
Deontic reasoning is the task of answering questions by applying explicit rules and policies to case-specific facts, for example computing…
Invariant Gradient Alignment for Robust Reasoning Distillation
Large language models (LLMs) suffer from shortcut learning: they systematically fail on out-of-distribution (OOD) inputs whose semantic sur…
Self-Reflective APIs: Structure Beats Verbosity for AI Agent Recovery
When an AI agent calls an API and hits a validation error, it needs more than what went wrong -- it needs what to do next. A self-reflectiv…
UniCAD: A Unified Benchmark and Universal Model for Multi-Modal Multi-Task CAD
Computer-Aided Design (CAD) underpins modern engineering and manufacturing by enabling the creation of precise, editable 3D models. However…
Automatic Generation of Titles for Research Papers Using Language Models
The title of a research paper conveys its primary idea and, occasionally, its conclusions in a clear and concise manner. Choosing an approp…
Arithmetic Pedagogy for Language Models
We investigate whether methods of human mathematics pedagogy can guide the training of language models toward arithmetic reasoning. Buildin…
Who Needs Labels? Adapting Vision Foundation Models With the Metadata You Already Have
We propose a label-free approach to adapt powerful but generic vision foundation models to specialized scientific domains. Standard supervi…
Continual Visual and Verbal Learning Through a Child's Egocentric Input
Children learn the meanings of words from a continuous, temporally structured stream of egocentric experience. Recent work shows that neura…
Audio Interaction Model
Audio is an inherently interactive modality, yet today's Large Audio Language Models (LALMs) are offline, and streaming audio models each h…
Towards Efficient and Evidence-grounded Mobility Prediction with LLM-Driven Agent
Individual-level mobility prediction is central to urban simulation, transportation planning, and policy analysis. Supervised sequence mode…
GeM-NR: Geometry-Aware Multi-View Editing for Nonrigid Scene Changes
Recent developments in multi-view image editing with generative models have brought us a step closer toward general 3D content generation a…
Failed Reasoning Traces Tell You What Is Fixable (But Not by Reading Them)
When post-trained language models fail on reasoning problems, the common test-time-scaling response is to spend more compute on additional…
Multi-Column RBF Neural Network Using Adaptive and Non-Adaptive Particle Swarm Optimization
The radial basis function neural network (RBFN) trained with a gradient descending algorithm provides an effective fully connected structur…
Reinforcement Learning from Rich Feedback with Distributional DAgger
Reasoning models have advanced rapidly, but the dominant reinforcement learning from verifiable rewards (RLVR) recipe remains surprisingly…
Streaming Communication in Multi-Agent Reasoning
Multi-agent reasoning systems adopt a "generate-then-transfer" paradigm that forces end-to-end latency to scale linearly with pipeline dept…
Longer Context, Deeper Thinking: Uncovering the Role of Long-Context Ability in Reasoning
Recent language models exhibit strong reasoning capabilities, yet the influence of long-context capacity on reasoning remains underexplored…
Breaking Bad Molecules: Are MLLMs Ready for Structure-Level Molecular Detoxification?
Toxicity remains a leading cause of early-stage drug development failure. Despite advances in molecular design and property prediction, the…
Constrained Adaptive Rejection Sampling
Language Models (LMs) are increasingly used in applications where generated outputs must satisfy strict semantic or syntactic constraints.…
Aligning Deep Implicit Preferences by Learning to Reason Defensively
Personalized alignment is crucial for enabling Large Language Models (LLMs) to engage effectively in user-centric interactions. However, cu…
Adaptive Minds: Empowering Agents with LoRA-as-Tools
We investigate a framework in which LoRA adapters are treated as callable tools that a base language model can dynamically select and invok…
BRAINCELL-AID: An Agentic AI Created Brain Cell Type Resource for Community Annotation
Single-cell RNA sequencing has transformed our ability to identify diverse cell types and their transcriptomic signatures. However, annotat…
A Unified Geometric Space for Topological Alignment Between Transformer-Based Models and Human Brain Networks
Prior brain-AI alignment studies are typically constrained by specific inputs and tasks, limiting their ability to capture organizational p…
MENTOR: A Metacognition-Driven Self-Evolution Framework for Uncovering and Mitigating Implicit Domain Risks in LLMs
Ensuring the safety of Large Language Models (LLMs) is critical for real-world deployment. However, current safety measures often fail to a…
Reasoning or Fluency? Dissecting Probabilistic Confidence in Best-of-N Selection
Probabilistic confidence metrics are increasingly adopted as proxies for reasoning quality in Best-of-N selection, under the assumption tha…
Success Conditioning as Policy Improvement: The Optimization Problem Solved by Imitating Success
A widely used technique for improving policies is success conditioning, in which one collects trajectories, identifies those that achieve a…
PersistBench: When Should Long-Term Memories Be Forgotten by LLMs?
Conversational assistants are increasingly integrating long-term memory with large language models (LLMs). This persistence of memories, e.…
Interfaze: The Future of AI is built on Task-Specific Small Models
We present Interfaze, a native hybrid model that fuses task-specific deep neural networks (CNNs and DNNs) directly into a transformer decod…
From Out-of-Distribution Detection to Hallucination Detection: A Geometric View
Detecting hallucinations in large language models is a critical open problem with significant implications for safety and reliability. Whil…
SciDER: Scientific Data-centric End-to-end Researcher
While large language models accelerate scientific discovery, existing agents face severe limitations in adaptability, domain generalization…
MedForge: Interpretable Medical Deepfake Detection via Forgery-aware Reasoning
Text-guided image editors can now manipulate authentic medical scans with high fidelity, enabling lesion implantation/removal that threaten…
Bilevel Autoresearch: Meta-Autoresearching Itself
If autoresearch is itself a form of research, then autoresearch can be applied to research itself. We present Bilevel Autoresearch, a bilev…
Formal Semantics for Agentic Tool Protocols: A Process Calculus Approach
The emergence of large language model agents capable of invoking external tools has created urgent need for formal verification of agent pr…
The Accountability Horizon: An Impossibility Theorem for Governing Human-Agent Collectives
Existing accountability frameworks for AI systems, legal, ethical, and regulatory, rest on a shared assumption: for any consequential outco…
Belief-Aware VLM Model for Human-like Reasoning
Traditional neural network models for intent inference rely heavily on observable states and struggle to generalize across diverse tasks an…
Binary Spiking Neural Networks as Causal Models
We provide a causal analysis of Binary Spiking Neural Networks (BSNNs) to explain their behavior. We formally define a BSNN and represent i…
SciIntegrity-Bench: A Benchmark for Evaluating Academic Integrity in AI Scientist Systems
AI scientist systems are increasingly deployed for autonomous research, yet their academic integrity has never been systematically evaluate…
Bad Seeing or Bad Thinking? Rewarding Perception for Multimodal Reasoning
Achieving robust perception-reasoning synergy is a central goal for advanced Vision-Language Models (VLMs). Recent advancements have pursue…
Unlocking Proactivity in Task-Oriented Dialogue
Proactive task-oriented dialogue (TOD), such as outbound sales, demands a persuasive agent that actively probes the user's concerns and ste…
AI を介した結果的な決定を選択するという幻想
ウルマン=マルガリットの選択の概念(変革的で、取り消し不可能で、差し押さえられた代替案によって影が隠れる)を利用して、現在の AI システムが、既存の AI 倫理が完全には捉えていない深刻な倫理的問題を提起していることを示します。それは、個人やグループが、真に選択できるようになるために必要な主体が弱体化している間に、意味のある結果的な選択の欺瞞的な外観に遭遇する選択の幻想です。 AI を主に既に与えられた目的の最適化装置として扱うアプローチに対して、私たちは、AI システムは選択という幻想からメタ能力を保護し育成するかどうかによって評価されるべきだと主張します。メタ能力とは、手段と目的を形成し、異議を唱え、修正し、所有することができる、社会的および制度的に足場を築かれた主体的能力のことです。この再構成は、AI を介した経路が行動や行動を誤った方向に導いた場合に、選択するという幻想のコストを吸収することが最も困難な恵まれない人々にとって特に緊急です。私たちは、AI を介した結果的意思決定のための 3 つの規範的命令を提案します。それは、予測の限界を認める実存的誠実さです。生態学的合理性。不均質な生きた生態の中に指針を位置づけます。そして、反事実的賠償。AI を介した意思決定経路が失敗した場合に、差し押さえられた代替手段を認めて修復します。
原文 (English)
The Illusion of Opting in AI-Mediated Consequential Decisions
Drawing on Ullmann-Margalit's concept of opting (transformative, irrevocable, and shadowed by foreclosed alternatives), we show that current AI systems raise a profound ethical problem that existing AI ethics has not fully captured: the illusion of opting, in which persons and groups encounter the deceptive appearance of meaningful consequential choice while the agency needed to become genuinely capable of choosing is weakened. Against approaches that treat AI primarily as an optimizer of already given ends, we argue that AI systems should be evaluated by whether they protect and cultivate meta-capacity against the illusion of opting: the socially and institutionally scaffolded agentive capacity through which means and ends can be formed, contested, revised, and owned. This reframing is especially urgent for disadvantaged populations, who are least able to absorb the costs of the illusion of opting when AI-mediated pathways misdirect behavior and action. We propose three normative imperatives for AI-mediated consequential decisions: existential honesty, which acknowledges the limits of prediction; ecological rationality, which situates guidance within heterogeneous lived ecologies; and counterfactual reparation, which acknowledges and repairs foreclosed alternatives when AI-mediated decision-making pathways fail.
SHARP: 長距離非定常時間パターン認識のための睡眠ベースの階層的加速再生
長距離の非定常時間パターンを学習することは、特に厳密なストリーミング設定において、現代のシーケンス モデルにとって依然として中心的な課題です。これらの設定では、データは順番に到着するため、過去の観測を同時に再検討することなく、単一パスで処理する必要があります。リカレント ニューラル ネットワークやトランスフォーマーを含む標準アーキテクチャは、時間軸全体にわたる切り詰められたバックプロパゲーション、または長距離クレジット割り当ての明示的な入力ウィンドウの長さによって制約されます。これらの制限に対処するために、私たちは、時間学習を 2 つの相補的なコンポーネントに分解するフレームワークである SHARP (Sleep-based Hierarchical Accelerated Replay) を提案します。1 つは過去の入力の構造化された履歴を蓄積するメモリ モジュール、もう 1 つはこのメモリ上で動作するパターン認識モジュールです。この分離により、長距離クレジット割り当ての多くのステップにわたる時間にわたるバックプロパゲーションの必要性がなくなり、非定常ダイナミクスへのリソース効率と計算効率の高い適応が可能になります。齧歯動物の徐波睡眠中に観察される再生の加速にヒントを得て、SHARP は、時間的に構造化された記憶追跡が加速された形で再生され、より高いレベルの記憶表現に統合されるオフライン (睡眠) フェーズを組み込んでおり、長距離のコンテキスト保持を向上させます。制御されたシミュレーションとアブレーション研究を通じて、提案されたフレームワークの主要な特性を特徴付けます。 text8 や PG-19 などのベンチマーク データセットでは、SHARP が、現在のストリームから学習を継続し、将来の未確認データに一般化しながら、以前に確認されたデータに対するネクスト トークン予測パフォーマンスを維持することにより、反復ベースラインよりも向上することを実証しました。これらの利点は、線形時間の計算コストのみで指数関数的に増加する効果的な時間コンテキストを生み出す階層構造によって実現されます。
原文 (English)
SHARP: Sleep-based Hierarchical Accelerated Replay for Long Range Non-Stationary Temporal Pattern Recognition
Learning long-range non-stationary temporal patterns remains a core challenge for modern sequence models, particularly in strict streaming settings. In these settings, data arrive sequentially and must be processed in a single pass without simultaneously revisiting past observations. Standard architectures, including recurrent neural networks and transformers, are constrained by either truncated backpropagation through time horizon or explicit input window length for long range credit assignment. To address these limitations, we propose SHARP (Sleep-based Hierarchical Accelerated Replay), a framework that decomposes temporal learning into two complementary components: a memory module that accumulates a structured history of past inputs, and a pattern-recognition module that operates over this memory. This separation enables resource- and compute-efficient adaptation to non-stationary dynamics by eliminating the need for backpropagation through time across many steps for long-range credit assignment. Inspired by the accelerated replay observed in rodents during slow-wave sleep, SHARP incorporates offline (sleep) phases in which temporally structured memory traces are replayed in an accelerated form and integrated into higher-level memory representations, improving long-range context retention. Through controlled simulations and ablation studies, we characterize the key properties of the proposed framework. In benchmark datasets such as text8 and PG-19, we demonstrate that SHARP improves over recurrent baselines by retaining next-token predictive performance on previously seen data while continuing to learn from the current stream and generalizing to future unseen data. These gains are enabled by its hierarchical structure, which yields an exponentially increasing effective temporal context with only linear-time computational cost.
サブリミナル学習はベクトル蒸留を操る
サブリミナル学習とは、教師の出力を微調整した場合に、出力が意味的にそれらの特性と無関係であるにもかかわらず、生徒の言語モデルが教師の特性 (システムが促すフクロウの好みなど) を獲得することを指します。セマンティックな意味を持たないデータがどのようにして特定のセマンティックな特徴を伝達できるのかについては、依然として十分に理解されていません。この研究では、サブリミナル学習が単一のステアリング ベクトル、つまりモデルの活性化に追加されるベクトルによって媒介されることを示します。 2 つのオープンソース モデル全体で、教師のシステム プロンプトはステアリング ベクトルによってよく近似されており、生徒の行動は微調整を通じて調整されたベクトルを学習することによって駆動されることがわかりました。ステアリング ベクトルによって適切に近似されていないシステム プロンプトは潜在的に学習されません。これは、ステアリング ベクトル蒸留の特殊なケースであり、ステアリングされた教師の出力で訓練された生徒が、そのステアリングを模倣することを学びます。一連のセマンティック ベクトルとランダム ベクトルに対するステアリング ベクトル蒸留を示します。モデルのアクティベーションにセマンティック ベクトルを追加すると、その動作にモデルに依存しない効果とモデル固有 (つまり、非セマンティック) の両方の効果が生じる可能性があるため、生成された非セマンティック データはセマンティック効果を持つベクトルを送信でき、サブリミナル学習が可能になります。これは、サブリミナル学習がモデル間で移行しない理由も説明します。言語モデルにおけるサブリミナル学習には適応オプティマイザーが必要であることがわかりました。ステアリングされたデータの活性化勾配はステアリング方向に沿って小さいながらも一貫した成分を運びますが、非適応オプティマイザーは外れ値の勾配が優勢になることを許可することでこれを妨げます。
原文 (English)
Subliminal Learning Is Steering Vector Distillation
Subliminal learning refers to a student language model acquiring a teacher's traits (e.g. a system-prompted preference for owls) when fine-tuned on the teacher's outputs, despite the outputs being semantically unrelated to those traits. It remains poorly understood how data without semantic meaning can transfer specific semantic traits. In this work, we show that subliminal learning is mediated by a single steering vector, i.e. a vector added to the model's activations. Across two open-source models, we find that the teacher's system prompt is well approximated by a steering vector, and that the student's behavior is driven by learning an aligned vector over fine-tuning. System prompts that are not well approximated by steering vectors are not subliminally learned. This is a special case of steering vector distillation, in which a student trained on the outputs of a steered teacher learns to imitate that steering. We demonstrate steering vector distillation on a range of semantic and random vectors. Adding a semantic vector to a model's activations can have both model-independent and model-specific (i.e. non-semantic) effects on its behavior, so generated data that is non-semantic can transmit a vector with semantic effects, enabling subliminal learning. This also explains why subliminal learning does not transfer between models. We find that adaptive optimizers are necessary for subliminal learning in language models: activation gradients on steered data carry a small but consistent component along the steering direction, and non-adaptive optimizers impede this by allowing outlier gradients to dominate.
AutoMedBench: Towards Medical AutoResearch with Agentic AI Models
Autonomous agents are increasingly expected to support end-to-end medical-AI research workflows, moving beyond isolated prediction tasks or…
歯科医療における大規模 AI モデル: 汎用システムからドメイン固有の基盤モデルまで
背景: 口腔疾患は世界中で約 35 億人に影響を与えていますが、歯科における大規模 AI モデルの相対的な臨床的可能性は依然として十分に理解されていません。言語生成モデル、弁別視覚基礎モデル、歯科特有の基礎モデルという 3 つの異なるモデル カテゴリが出現しましたが、それらの関係や集合的な制限を検討する統一されたレビューはありません。方法: PRISMA-ScR ガイドラインに従って、4 つのデータベース (PubMed、Google Scholar、Scopus、arXiv) を体系的に検索し、2 人の査読者によって独立してスクリーニングされました。包含/除外基準を適用した後、97 件の研究 (2020 ~ 2026 年) が含まれました。建築パラダイムと歯科専門度によってモデルを整理する二次元分類フレームワークを提案します。結果: 言語生成モデルは、テキストベースのタスク (臨床推論、免許試験、患者とのコミュニケーション) には優れていますが、画像依存の診断では一貫性のないパフォーマンスを示します。適応された SAM および CLIP バリアントにより、強力な歯のセグメンテーションと病変検出結果が得られます。歯科専用モデル (DentVFM、DentVLM、OralGPT) は、複雑なマルチモーダルなタスクで最高のパフォーマンスを発揮します。統合されたパイプラインは、単一モデルのアプローチよりも常に優れたパフォーマンスを発揮します。データの非対称性が観察されます。歯科特有の事前トレーニングはほぼ完全に視覚領域に集中しており、大規模な歯科テキスト コーパスがほとんどないことを反映しています。結論: 汎用モデルと歯科専用モデルは補完的な役割を果たします。最も効果的なシステムは、構造化されたパイプライン内で両方を組み合わせたものです。安全な自律展開には、生成モデルにおける幻覚、注釈付き歯科データセットの制限、標準化された臨床評価ベンチマークの欠如という 3 つの永続的な障壁を解決する必要があります。
原文 (English)
Large AI Models in Dental Healthcare: From General-Purpose Systems to Domain-Specific Foundation Models
Background: Oral diseases affect nearly 3.5 billion people worldwide, yet the comparative clinical potential of large-scale AI models in dentistry remains poorly understood. Three distinct model categories have emerged: language-generative models, discriminative vision foundation models, and dental-specific foundation models, with no unified review examining their relationships and collective limitations. Methods: Following PRISMA-ScR guidelines, we systematically searched four databases (PubMed, Google Scholar, Scopus, arXiv), screened independently by two reviewers. After applying inclusion/exclusion criteria, 97 studies (2020-2026) were included. We propose a two-dimensional classification framework organizing models by architectural paradigm and dental specialization degree. Results: Language-generative models excel at text-based tasks (clinical reasoning, licensing exams, patient communication) but show inconsistent performance on image-dependent diagnostics. Adapted SAM and CLIP variants achieve strong tooth segmentation and lesion detection results. Dental-specific models (DentVFM, DentVLM, OralGPT) demonstrate strongest performance on complex multimodal tasks. Integrated pipelines consistently outperform single-model approaches. A data asymmetry is observed: dental-specific pretraining concentrates almost entirely in the vision domain, reflecting scarce large-scale dental text corpora. Conclusions: General-purpose and dental-specific models play complementary roles; the most effective systems combine both within structured pipelines. Safe autonomous deployment requires resolving three persistent barriers: hallucination in generative models, limited annotated dental datasets, and absent standardized clinical evaluation benchmarks.
LEAP: エージェント フレームワークを使用した形式数学用の LLM のスーパーチャージング
大規模言語モデル (LLM) は強力な非公式数学的推論を示しますが、リーンのような形式言語では機械的に検証可能な証明を生成するのに苦労します。 LEAP は、汎用基礎モデルが自動化された形式定理証明で最先端のパフォーマンスを達成できるようにするエージェント フレームワークです。 LEAP は、非公式推論、指示に従って、反復的な自己改善などの基礎モデルの機能を活用します。複雑な問題をより小さな単位に分解することで、システムはリーン コンパイラーとの継続的な対話を通じて、正式な証明の構築と非公式のブループリントの橋渡しをします。ますます飽和しつつあるベンチマークを超えた厳密な評価を提供するために、リーンで形式化された IMO スタイルの問題のベンチマークである Lean-IMO-Bench を導入します。このベンチマークでは、短いステートメントでありながら非常に非日常的で、幅広い難易度にわたる複数ステップの証明が行われます。経験的に、北米の学部学生を対象とした毎年恒例の数学コンテストである最新の 2025 年のパトナム コンペティションでは、LEAP は 12 の問題すべてを解決し、フロンティアの正式な数学モデルによる最近の進歩と一致しています。 Lean-IMO-Bench では、LEAP は汎用 LLM のワンショット形式解決率を 10% 未満から 70% に引き上げ、特に金メダル級の専門化された IMO システムによって設定されたベンチマークの 48% を上回っています。さらに、偶数次ケイリーグラフのクヌースのハミルトニアン分解における重要な部分問題の検証された証明を含む、オープンな組み合わせ課題に対する複雑な証明を自律的に形式化することで、LEAP の研究レベルの有用性を実証します。
原文 (English)
LEAP: Supercharging LLMs for Formal Mathematics with Agentic Frameworks
Large Language Models (LLMs) exhibit strong informal mathematical reasoning but struggle to generate mechanically verifiable proofs in formal languages like Lean. We present LEAP, an agentic framework that enables general-purpose foundation models to achieve state-of-the-art performance on automated formal theorem proving. LEAP leverages foundation model capabilities, such as informal reasoning, instruction following, and iterative self-refinement. By decomposing complex problems into smaller units, the system bridges formal proof construction with informal blueprints through continuous interaction with the Lean compiler. To provide a rigorous evaluation beyond increasingly saturated benchmarks, we introduce Lean-IMO-Bench, a benchmark of IMO-style problems formalized in Lean, with short statements yet highly non-routine and multi-step proofs across a wide range of difficulty levels. Empirically, on the latest 2025 Putnam Competition, an annual mathematics competition for undergraduate students in North America, LEAP solves all 12 problems, matching recent breakthroughs by frontier formal mathematical models. On Lean-IMO-Bench, LEAP boosts the one-shot formal solve rate of general-purpose LLMs from below 10% to 70%, notably surpassing the 48% benchmark set by a specialized, gold-medal-caliber IMO system. Furthermore, we demonstrate LEAP's research-level utility by autonomously formalizing complex proofs for open combinatorial challenges, including a verified proof for a key subproblem in Knuth's Hamiltonian decomposition of even-order Cayley graphs.
答えから状態へ: 大規模言語モデルにおける化学推論の検証可能なプロセスレベルの評価
大規模な言語モデルが化学アシスタントとして使用されることが増えていますが、ほとんどの化学ベンチマークは依然として最終的な回答のみをスコアとしています。これにより、重大な故障モードが隠蔽されます。モデルは、その推論が化学ロジックに違反しているにもかかわらず、正しい分子、生成物、またはオプションを出力する可能性があります。 LLM ジャッジと人間のステップレベルのプロセス アノテーションはコストが高く、一貫性がなく、幻覚に対して脆弱であるため、既存のプロセス レベルの評価機能を拡張するのは困難です。 ChemCoTBench-V2 は、構造化され検証者がアドレス指定できる化学推論トレースを低コストで監査可能に評価するためのルール検証可能な診断ベンチマークです。これは、分子理解、分子編集、分子最適化、反応予測に及び、18 のレポートタスクにわたる 5,620 の評価サンプルを備えています。モデルは、専門家が設計したテンプレートで主要な中間ステップを公開する必要があり、それらのステップは決定論的な化学ルールでチェックされ、クローズドアンサータスクの場合は、別の LLM 審査員ではなく参照トレースが使用されます。オープンエンド分子最適化は、厳密なトレース マッチングではなく、Oracle で検証可能な状態制約を使用して評価されます。このベンチマークは、最終回答の正確性、テンプレートの遵守、専門家によって洗練された中間コミットメントに対する段階的な検証者の正確さという 3 つの個別のシグナルを報告します。フロンティア モデルの実験では、最終的な回答の成功と構造化推論の状態の一貫性の間には永続的なギャップがあることが明らかになりました。モデルは多くの場合、化学ステップ チェックに失敗しながらも要求された形式に従っているか、弱い裏付け推論で正しく回答することができます。 ChemCoTBench-V2 は、きめ細かいモデル比較を可能にし、トレースが最初に検証ツールに違反する具体的なステップを特定します。
原文 (English)
From Answers to States: Verifiable Process-Level Evaluation of Chemical Reasoning in Large Language Models
Large language models are increasingly used as chemistry assistants, yet most chemistry benchmarks still score only final answers. This masks a critical failure mode: a model may output the correct molecule, product, or option while its reasoning violates chemical logic. Existing process-level evaluators are hard to scale because LLM judges and human step-level process annotation are costly, inconsistent, and vulnerable to hallucination. We introduce ChemCoTBench-V2, a rule-verifiable diagnostic benchmark for low-cost, auditable evaluation of structured, verifier-addressable chemical reasoning traces. It spans molecular understanding, molecule editing, molecular optimization, and reaction prediction, with 5,620 evaluation samples across 18 reporting tasks. Models must expose key intermediate steps in expert-designed templates, and those steps are checked with deterministic chemistry rules and, for closed-answer tasks, reference traces rather than another LLM judge. Open-ended molecular optimization is evaluated with oracle-verifiable state constraints rather than strict trace matching. The benchmark reports three separate signals: final-answer correctness, template adherence, and step-wise verifier correctness over expert-refined intermediate commitments. Experiments on frontier models reveal a persistent gap between final-answer success and structured-reasoning-state consistency: models often follow the requested format while failing chemical-step checks, or answer correctly with weak supporting reasoning. ChemCoTBench-V2 enables fine-grained model comparison and identifies the concrete step at which the trace first violates the verifier.
エントロピーだけでは不十分: ビジョンに基づいたトークン選択による視覚的推論のための効果的な強化学習のロックを解除する
トークンレベルのエントロピーは、検証可能な報酬を伴うテキストのみの強化学習 (RLVR) における単位の割り当てに有効であると一般に認識されていますが、このメカニズムが視覚的推論に依然として適用されるかどうかは不明のままです。私たちの対照的な研究は、自然にエントロピーが低い視覚に敏感なトークンの省略により、視覚推論ではこのメカニズムが崩壊することを示しています。既存のマルチモーダル RL 手法は、視覚認識の重要性をますます認識していますが、体系的な視覚測定が欠けているか、トークンのエントロピーが主に意味論的探索を推進していることを見落としているため、正確な知覚基礎と意味論的推論を交互に配置するという固有の需要を満たすのに苦労しています。これに対処するために、原則的な乗算結合を介して視覚的感度とトークン エントロピーを明示的に統合する効果的な RL フレームワークである VEPO (ポリシー最適化のためのビジョン エントロピー トークン選択) を導入します。VEPO は、視覚的に根拠があり、同時に高度に情報を提供するトークンに勾配クレジットをリダイレクトします。広範な実験により、VEPO の優れたパフォーマンスが実証され、エントロピーのみのベースラインを 7B スケールで 2.28 ポイント、3B スケールで 3.15 ポイント上回りました。アブレーションは、私たちの方法の健全性をさらに実証します。
原文 (English)
Entropy Is Not Enough: Unlocking Effective Reinforcement Learning for Visual Reasoning via Vision-Anchored Token Selection
While token-level entropy is commonly recognized as effective for credit assignment in text-only reinforcement learning with verifiable rewards (RLVR), it remains unclear whether this mechanism still holds in visual reasoning. Our controlled study shows that this mechanism collapses in visual reasoning due to the omission of vision-sensitive tokens with naturally low entropy. Although existing multimodal RL methods increasingly acknowledge the importance of visual perception, they struggle to satisfy the inherent demand for interleaving precise perceptual grounding with semantic reasoning, either lacking systematic visual measurements or overlooking that token entropy primarily drives semantic exploration. To address this, we introduce VEPO (Vision-Entropy token-selection for Policy Optimization), an effective RL framework explicitly integrating visual sensitivity with token entropy via a principled multiplicative coupling, where VEPO redirects gradient credit toward tokens which are simultaneously visually grounded and highly informative. Extensive experiments demonstrate VEPO's leading performance, significantly outperforming the entropy-only baseline by 2.28 points at 7B-scale and 3.15 points at 3B-scale. Ablations further substantiate the soundness of our method.
想像力の知覚トークンはマルチモーダル言語モデルの空間推論を強化します
ビジョン言語モデル (VLM) は多くのタスクに優れていますが、重要な情報が直接観察できない場合には空間推論に依然として苦労します。このような問題の多くは、目に見えない視点から何が見えるかを推測したり、遮蔽された空間を通る経路を追跡したり、部分的な観察を一貫した空間表現に統合したりするなど、想像力豊かな認識を必要とします。観察された入力との一貫性を保ちながら、代替の空間構成の下で VLM が知覚するものを外部化する中間的な知覚表現である想像的知覚トークン (IPT) を導入します。この機能を研究するために、透視図法取得 (PET)、パス トレーシング (PT)、およびマルチビュー カウンティング (MVC) という 3 つのタスクを定式化し、グラウンド トゥルースの想像力、回答、評価ベンチマークを含む約 20,000 例のデータセットを構築します。統合された VLM BAGEL をバックボーンとして使用することで、IPT 監視は空間推論を一貫して改善し、推論時に画像を生成しなくても、テキストによる思考連鎖トレーニングを上回ることがよくあります。 MVC では、IPT は精度を 3.4% 向上させ、PT 上の強力なクローズドソース モデルにより競争力のあるパフォーマンスを実現します。さらに、IPT とラベルのみの監視を組み合わせるとさらなる利益が得られる一方、テキストの思考連鎖はパフォーマンスを大幅に低下させる可能性があることがわかり、空間計算が言語を通じて強制される場合にはモダリティの不一致が示唆されます。全体として、IPT は、観察されていない空間構造について推論するための原則に基づいた監視信号を提供し、解釈可能な中間表現を生成しながら一般化を向上させます。
原文 (English)
Imaginative Perception Tokens Enhance Spatial Reasoning in Multimodal Language Models
Vision language models (VLMs) excel at many tasks but still struggle with spatial reasoning when critical information is not directly observable. Many such problems require imaginative perception: inferring what would be seen from an unseen viewpoint, tracing paths through occluded spaces, or integrating partial observations into a coherent spatial representation. We introduce Imaginative Perception Tokens (IPT), intermediate perceptual representations that externalize what a VLM would perceive under alternative spatial configurations while remaining consistent with the observed input. To study this capability, we formulate three tasks, Perspective Taking (PET), Path Tracing (PT), and Multiview Counting (MVC), and construct datasets of approximately 20K examples with ground truth imaginations, answers, and evaluation benchmarks. Using the unified VLM BAGEL as the backbone, IPT supervision consistently improves spatial reasoning and often outperforms textual chain of thought training, even without generating images at inference time. On MVC, IPT improves accuracy by 3.4% and achieves competitive performance with strong closed-source models on PT. We further find that combining IPT and label-only supervision yields additional gains, whereas textual chain of thought can substantially degrade performance, suggesting a modality mismatch when spatial computation is forced through language. Overall, IPT provides a principled supervision signal for reasoning about unobserved spatial structure, improving generalization while producing interpretable intermediate representations.
Transformer-Based Autonomous Driving Models and Deployment-Oriented Compression: A Survey
Transformer-based models are becoming a central paradigm in autonomous driving because they can capture long-range spatial dependencies, mu…
ChatSOP: An SOP-Guided MCTS Planning Framework for Controllable LLM Dialogue Agents
Dialogue agents powered by Large Language Models (LLMs) show superior performance in various tasks. Despite the better user understanding a…
CounterFace: A Synthetic Face Dataset for Fine-Grained Counterfactual Evaluation of Face Recognition Systems
Face recognition (FR) systems are widely deployed in critical applications, making their reliability and robustness across diverse populati…
SSSD: Simply-Scalable Speculative Decoding
Speculative Decoding has emerged as a popular technique for accelerating inference in Large Language Models. However, most existing approac…
LaVIDE: Language-Prompted Satellite Change Detection via Map-Image Alignment
Remote sensing change detection based on a map reference and an up-to-date image boosts timely observation of the Earth's surface when earl…
From Motion Signals to Insights: A Unified Framework for Student Behavior Analysis and Feedback in Physical Education Classes
Analyzing student behavior in educational scenarios is crucial for enhancing teaching quality and student engagement. Existing AI-based mod…
Speculative Thinking: Enhancing Small-Model Reasoning with Large Model Guidance at Inference Time
Recent advances leverage post-training to enhance model reasoning performance, which typically requires costly training pipelines and still…
SoLoPO: Unlocking Long-Context Capabilities in LLMs via Short-to-Long Preference Optimization
Despite advances in pretraining with extended context sizes, large language models (LLMs) still face challenges in effectively utilizing re…
100-LongBench: Are de facto Long-Context Benchmarks Literally Evaluating Long-Context Ability?
Long-context capability is considered one of the most important abilities of LLMs, as a truly long context-capable LLM enables users to eff…
Model-Preserving Adaptive Rounding
The goal of quantization is to produce a compressed model whose output distribution is as close to the original model's as possible. To do…
MesaNet: Sequence Modeling by Locally Optimal Test-Time Training
Sequence modeling is currently dominated by causal transformer architectures that use softmax self-attention. Although widely adopted, tran…
Can VLMs Predict Future States? Bootstrapping World Models from Inverse Dynamics
Can unified vision-language models (VLMs) perform forward dynamics prediction (FDP), i.e., predicting the future state (in image form) give…
Time Series Forecasting as Reasoning: A Slow-Thinking Approach with Reinforced LLMs
To advance time series forecasting (TSF), various methods have been proposed to improve prediction accuracy, evolving from statistical tech…
From Graph Retrieval to Schema Realization: Counterfactual Validation for Text-to-SPARQL over Heterogeneous Knowledge Graphs
Text-to-SPARQL maps natural-language questions to executable SPARQL queries over RDF knowledge graphs. While standard evaluations often fix…
VGGSounder: Audio-Visual Evaluations for Foundation Models
The emergence of audio-visual foundation models underscores the importance of reliably assessing their multi-modal understanding. The VGGSo…
A Study of the Scale Invariant Signal to Distortion Ratio in Speech Separation with Noisy References
This paper examines the implications of using the Scale-Invariant Signal-to-Distortion Ratio (SI-SDR) as both evaluation and training objec…
BioBlue: Systematic runaway-optimiser-like LLM failure modes on biologically and economically aligned AI safety benchmarks for LLMs with simplified observation format
Many AI alignment discussions of "runaway optimisation" focus on RL agents: unbounded utility maximisers that over-optimise a proxy objecti…
Uncertainty Estimation using Variance-Gated Distributions
Evaluation of per-sample uncertainty quantification from neural networks is essential for decision-making involving high-risk applications.…
KITE: Kernelized and Information Theoretic Exemplars for In-Context Learning
In-context learning (ICL) has emerged as a powerful paradigm for adapting large language models (LLMs) to new and data-scarce tasks using o…
ClustRecNet: A Novel End-to-End Deep Learning Framework for Clustering Algorithm Recommendation
Identifying an effective clustering algorithm for a given dataset remains a fundamental unsupervised learning issue. We introduce ClustRecN…
Platonic Transformers: A Solid Choice For Equivariance
While widespread, Transformers lack inductive biases for geometric symmetries common in science and computer vision. Existing equivariant m…
Can Reasoning Path still be Effective as Input? Bridging Post-Reasoning to Chain-of-Thought Compression
Recent developments have enabled advanced reasoning in Large Language Models (LLMs) via long Chain-of-Thought (CoT), trading efficiency dur…
Simplicial Embeddings Improve Sample Efficiency in Actor-Critic Agents
Recent works have proposed accelerating the wall-clock training time of actor-critic methods via the use of large-scale environment paralle…
Test-time reward-guided alignment of language models by importance sampling on pre-logit space
Test-time alignment of large language models (LLMs) attracts attention because fine-tuning of LLMs requires high computational costs. In th…
Vectorized Online POMDP Planning
Planning under partial observability is an essential capability of autonomous robots. The Partially Observable Markov Decision Process (POM…
Extending Fair Null-Space Projections for Continuous Attributes to Kernel Methods
With the on-going integration of machine learning systems into the everyday social life of millions the notion of fairness becomes an ever…
OckBench: Measuring the Efficiency of LLM Reasoning
Large language models (LLMs) such as GPT-5 and Gemini 3 have pushed the frontier of automated reasoning and code generation. Yet current be…
SAM 3D: 3Dfy Anything in Images
We present SAM 3D, a generative model for visually grounded 3D object reconstruction, predicting geometry, texture, and layout from a singl…
AttnRegDeepLab: A Two-Stage Decoupled Framework for Interpretable Embryo Fragmentation Grading
Embryo fragmentation is a morphological indicator critical for evaluating developmental potential in In Vitro Fertilization (IVF). However,…
Dynamic Content Moderation in Livestreams: Combining Supervised Classification with MLLM-Boosted Similarity Matching
Content moderation remains a critical yet challenging task for large-scale user-generated video platforms, especially in livestreaming envi…
Topology Matters: Measuring Memory Leakage in Multi-Agent LLMs
Graph topology is a fundamental determinant of memory leakage in multi-agent LLM systems, yet its effects remain poorly quantified. We intr…
From Segments to Scenes: Temporal Understanding for Agentic Autonomous Driving via Vision-Language Models
Vision-Language Models (VLMs) are increasingly deployed as the perception and reasoning backbone of autonomous agents acting in the wild, w…
DVGT: Driving Visual Geometry Transformer
Perceiving and reconstructing 3D scene geometry from visual inputs is crucial for autonomous driving. However, there still lacks a driving-…
You Only Train Once: Differentiable Subset Selection for Omics Data
Selecting compact and informative gene subsets from single-cell transcriptomic data is essential for biomarker discovery, improving interpr…
Semiparametric Preference Optimization: Your Language Model is Secretly a Single-Index Model
Policy alignment to preference data typically assumes a known link function between observed preferences and latent rewards (e.g., Bradley-…
Geometry-Aware Hallucination Detection in Large Language Models
Large language models (LLMs) frequently generate factually incorrect or unsupported content, commonly referred to as hallucinations. Prior…
Mid-Think: Training-Free Intermediate-Budget Reasoning via Token-Level Triggers
Hybrid reasoning language models are commonly controlled through high-level Think/No-think instructions to regulate reasoning behavior, yet…
Bounded Hyperbolic Tangent: A Stable and Efficient Alternative to Pre-Layer Normalization in Large Language Models
Pre-Layer Normalization (Pre-LN) is the de facto choice for large language models (LLMs) and is crucial for stable pretraining and effectiv…
MedRedFlag: Investigating how LLMs Redirect Misconceptions in Real-World Health Communication
Real-world health questions from patients often unintentionally embed false assumptions or premises. In such cases, safe medical communicat…
Outcome-Based RL Provably Leads Transformers to Reason, but Only With the Right Data
Transformers trained via Reinforcement Learning (RL) with outcome-based supervision can spontaneously develop the ability to generate inter…
Can professional translators identify machine-generated text?
This study investigates whether professional translators without prior specialized training can reliably identify short stories generated i…
Do readers prefer AI-generated Italian short stories?
This study investigates whether readers prefer AI-generated short stories in Italian over one written by a renowned Italian author. In a bl…
Demystifying Multi-Agent Debate: The Role of Confidence and Diversity
Multi-agent debate (MAD) is widely used to improve large language model (LLM) performance through test-time scaling, yet recent work shows…
Conditional PED-ANOVA: Hyperparameter Importance in Hierarchical & Dynamic Search Spaces
We propose conditional PED-ANOVA (condPED-ANOVA), a principled framework for estimating hyperparameter importance (HPI) in conditional sear…
L$^3$: Large Lookup Layers
Modern sparse language models typically achieve sparsity through Mixture-of-Experts (MoE) layers, which dynamically route tokens to dense M…
Culturally Grounded Personas in Large Language Models: Characterization and Alignment with Socio-Psychological Value Frameworks
Despite the growing utility of Large Language Models (LLMs) for simulating human behavior, the extent to which these synthetic personas acc…
Tuning the Implicit Regularizer of Masked Diffusion Language Models: Enhancing Generalization via Insights from $k$-Parity
Masked Diffusion Language Models have recently emerged as a powerful generative paradigm, yet their generalization properties remain unders…
R3G: A Reasoning-Retrieval-Reranking Framework for Vision-Centric Answer Generation
Vision-centric retrieval for VQA requires retrieving images to supply missing visual cues and integrating them into the reasoning process.…
SUSD: Structured Unsupervised Skill Discovery through State Factorization
Unsupervised Skill Discovery (USD) aims to autonomously learn a diverse set of skills without relying on extrinsic rewards. One of the most…
Efficient Adversarial Attacks on High-dimensional Offline Bandits
Bandit algorithms have recently emerged as a powerful tool for evaluating machine learning models, including generative image models and la…
Making Expert Reasoning Learnable with Self-Distillation
Improving the reasoning capabilities of large language models (LLMs) typically relies either on the model's ability to sample a correct sol…
What Structural Inductive Bias Helps Transformers Reason Over Knowledge Graphs? A Study with Tabula RASA
What structural inductive bias helps transformers reason over knowledge graphs? Through controlled ablations of a minimal transformer modif…
TamperBench: Systematically Stress-Testing LLM Safety Under Fine-Tuning and Tampering
As increasingly capable open-weight large language models (LLMs) are deployed, improving their tamper resistance against unsafe modificatio…
Learning to Remember, Learn, and Forget in Attention-Based Models
In-Context Learning (ICL) in transformers acts as an online associative memory and is believed to underpin their high performance on comple…
AlgoVeri: An Aligned Benchmark for Verified Code Generation on Classical Algorithms
Vericoding refers to the generation of formally verified code from rigorous specifications. Recent AI models show promise in vericoding, bu…
MuCO: Generative Peptide Cyclization Empowered by Multi-stage Conformation Optimization
Modeling peptide cyclization is critical for the virtual screening of candidate peptides with desirable physical and pharmaceutical propert…
Unifying Model-Free Efficiency and Model-Based Representations via Latent Dynamics
We present Unified Latent Dynamics (ULD), a novel reinforcement learning algorithm that unifies the efficiency of model-free methods with t…
Toward Autonomous O-RAN: A Multi-Scale Agentic AI Framework for Real-Time Network Control and Management
Open Radio Access Networks (O-RAN) promise flexible 6G network access through disaggregated, software-driven components and open interfaces…
Tomography by Design: An Algebraic Approach to Low-Rank Quantum States
We present an algebraic algorithm for quantum state tomography that leverages measurements of certain observables to estimate structured en…
A Unified Framework for Locality in Scalable MARL
Scalable methods for networked multi-agent reinforcement learning let each agent plan using only a small neighborhood of the agent graph. T…
DSL-Topic: Improving Topic Modeling by Distilling Soft Labelsfrom Language Models
Traditional neural topic models are typically optimized by reconstructing the document's Bag-of-Words (BoW) representations, overlooking co…
Value Entanglement: Conflation Between Different Kinds of Good In (Some) Large Language Models
Value alignment of Large Language Models (LLMs) requires us to empirically measure these models' actual, acquired representation of value.…
Does Order Matter : Connecting The Law of Robustness to Robust Generalization
Bubeck and Selke (2021) propose the connection between the Law of Robustness and robust generalization error as an open problem. The Law of…
Evaluating Zero-Shot and One-Shot Adaptation of Small Language Models in Leader-Follower Interaction
Leader-follower interaction is an important paradigm in human-robot interaction (HRI). Yet, assigning roles in real time remains challengin…
ShareVerse: Multi-Agent Consistent Video Generation for Shared World Modeling
This paper presents ShareVerse, a video generation framework enabling multi-agent shared world modeling, addressing the gap in existing wor…
Beyond Pixel Histories: World Models with Persistent 3D State
Interactive world models continually generate video by responding to a user's actions, enabling open-ended generation capabilities. However…
vLLM Semantic Router: Signal Driven Decision Routing for Mixture-of-Modality Models
As large language models (LLMs) diversify across modalities, capabilities, and cost profiles, the problem of intelligent request routing: s…
ZeroWBC: Learning Natural Whole-Body Humanoid Interaction from Human Egocentric Data
Achieving versatile and natural whole-body humanoid interaction control remains challenging due to the high cost of whole-body teleoperatio…
Physics-Informed Neural Engine Sound Modeling with Differentiable Pulse-Train Synthesis
Engine sounds originate from sequential exhaust pressure pulses rather than sustained harmonic oscillations. While neural synthesis methods…
EvoPrompt: Guided Prompt Evolution for Vision-Language Models Adaptation
The adaptation of large-scale vision-language models (VLMs) to downstream tasks with limited labeled data remains a significant challenge.…
Safety Under Scaffolding: How Evaluation Conditions Shape Measured Safety
A safety score earned on a benchmark need not predict how the same model behaves once it is wrapped in an agentic scaffold the benchmark ne…
Quantum entanglement provides a competitive advantage in adversarial games
Whether uniquely quantum resources confer advantages in fully classical, competitive environments remains an open question. Competitive zer…
ContactExplorer: Contact Coverage-Guided Exploration for General-Purpose Dexterous Manipulation
Reinforcement learning has achieved remarkable success in domains such as Atari games, navigation, and locomotion, where exploration can of…
Revisiting Model Stitching In the Foundation Model Era
Model stitching, connecting early layers of one model (source) to later layers of another (target) via a light stitch layer, has served as…
VulnAgent-R2: Evidence-Calibrated Multi-Agent Auditing for Repository-Level Vulnerability Detection
Software vulnerabilities often depend on cross-file data flow, build options, framework conventions, and runtime guards, so isolated functi…
Spatial Transcriptomics as Images for Large-Scale Pretraining
Spatial Transcriptomics (ST) profiles thousands of gene expression values at discrete spots with precise coordinates on tissue sections, pr…
AgentDS Technical Report: Benchmarking the Future of Human-AI Collaboration in Domain-Specific Data Science
Data science plays a critical role in transforming complex data into actionable insights across numerous domains. Recent developments in la…
FinTradeBench: A Financial Reasoning Benchmark for LLMs
Real-world financial decision-making is a challenging problem that requires reasoning over heterogeneous signals, including company fundame…
GenSpan: Generation-Calibrated Motion Span Priors for Multi-Verb Video Corpus Moment Retrieval
Video Corpus Moment Retrieval (VCMR) aims to retrieve both the correct video and its temporal segment corresponding to a natural-language q…
PoliticsBench: Benchmarking Political Values in Large Language Models with Multi-Turn Roleplay
While Large Language Models (LLMs) are increasingly used as primary sources of information, their potential for political bias may impact t…
On-the-fly Repulsion in the Contextual Space for Rich Diversity in Diffusion Transformers
Modern Text-to-Image (T2I) diffusion models have achieved remarkable semantic alignment, yet they often suffer from a significant lack of v…
Emotion Entanglement and Bayesian Inference for Multi-Dimensional Emotion Understanding
Understanding emotions in natural language is inherently a multi-dimensional reasoning problem, where multiple affective signals interact t…
Inclusion-of-Thoughts: Mitigating Preference Instability via Purifying the Decision Space
Multiple-choice questions (MCQs) are widely used to evaluate large language models (LLMs). However, LLMs remain vulnerable to the presence…
Policy Split: Incentivizing Dual-Mode Exploration in LLM Reinforcement with Dual-Mode Entropy Regularization
To encourage diverse exploration in reinforcement learning (RL) for large language models (LLMs) without compromising accuracy, we propose…
Contextual Multi-Task Reinforcement Learning for Autonomous Reef Monitoring
Although autonomous underwater vehicles promise the capability of marine ecosystem monitoring, their deployment is fundamentally limited by…
Generative Augmented Inference
Large language models enable inexpensive AI-generated annotations, but using them reliably for causal inference remains challenging. Naivel…
Luminol-AIDetect: Fast Zero-shot Machine-Generated Text Detection based on Perplexity under Text Shuffling
Machine-generated text (MGT) detection requires identifying structurally invariant signals across generation models, rather than relying on…
MAEPose: Self-Supervised Spatiotemporal Learning for Human Pose Estimation on mmWave Video
Millimetre-wave (mmWave) radar offers a more privacy-preserving alternative to RGB-based human pose estimation. However, existing methods t…
Stochastic Sparse Attention for Memory-Bound Inference
Autoregressive decoding becomes bandwidth-limited at long contexts, as generating each token requires reading all $n_k$ key and value vecto…
SkCC: Portable and Secure Skill Compilation for Cross-Framework LLM Agents
LLM agents increasingly rely on reusable skills (e.g., SKILL markdown files) to execute complex tasks, yet these artifacts lack portability…
Efficiently Aligning Language Models with Online Natural Language Feedback
Reinforcement learning with verifiable rewards has been used to elicit impressive performance from language models in many domains. But, br…
A Systematic Investigation of RL-Jailbreaking in LLMs
The evolution of generative models from next-token predictors to autonomous engines of complex systems necessitates rigorous safety hardeni…
Curated Synthetic Data Doesn't Have to Collapse: A Theoretical Study of Generative Retraining with Pluralistic Preferences
Recursive retraining of generative models poses a critical representation challenge: when synthetic outputs are curated based on a fixed re…
FactoryNet: A Large-Scale Dataset toward Industrial Time-Series Foundation Models
We introduce the first universal pretraining corpus for industrial time-series data: FactoryNet. 51M datapoints across 23k end-to-end task…
HEPA: A Self-Supervised Horizon-Conditioned Event Predictive Architecture for Time Series
Critical events in multivariate time series, from turbine failures to cardiac arrhythmias, demand accurate prediction, yet labeled data is…
Widening the Gap: Exploiting LLM Quantization via Outlier Injection
LLM quantization has become essential for memory-efficient deployment. Recent work has shown that quantization schemes can pose critical se…
Do LLMs Hold Their Values? MANTA: A Multi-Turn Adversarial Benchmark for Animal Welfare Reasoning
Evaluating animal welfare reasoning in LLMs remains an open challenge despite rapid deployment in consumer and professional contexts where…
Retrieval and competition: how a protein foundation model starts a protein
Protein language models are increasingly used to guide experimental and clinical decisions, yet it is often unclear whether a confident pre…
Position: State-of-the-Art Claims Require State-of-the-Art Evidence
State-of-the-Art (SOTA) claims pervade Artificial Intelligence (AI) and Machine Learning (ML) research. These claims rest on benchmark eval…
ZeroUnlearn: Few-Shot Knowledge Unlearning in Large Language Models
Large language models inevitably retain sensitive information, defined as inputs that may induce harmful generations, due to training on ma…
Markov Chain Decoders Overcome the Heavy-Tail Limitations of Lipschitz Generative Models
Heavy-tailed distributions are prevalent in performance evaluation, network traffic, and risk modeling. This behavior poses a fundamental c…
DEFLECT: Temporal Counterfactual Preference Learning for Delay-Robust Asynchronous VLAs
Vision-Language-Action (VLA) policies increasingly rely on asynchronous inference to hide large-model latency behind ongoing robot motion.…
Rebalancing Reference Frame Dominance to Improve Motion in Image-to-Video Models
Image-to-video models often generate videos that remain overly static, compared to text-to-video models. While prior approaches mitigate th…
REFLECTOR: Internalizing Step-wise Reflection against Indirect Jailbreak
While Large Language Models (LLMs) demonstrate remarkable capabilities, they remain susceptible to sophisticated, multi-step jailbreak atta…
Lost in Fog: Sensor Perturbations Expose Reasoning Fragility in Driving VLAs
Interpretable autonomous driving planners depend not only on generating explanations, but also on those explanations remaining reliable und…
メタ学習による費用対効果の高いモデル評価
機械学習の急速な成長により、拡大し続けるモデルのエコシステムが生み出され、目に見えないラベルのないデータに対して新しくリリースされたモデルの信頼性を検証することがますます困難になっています。従来の評価パイプラインは、高価なアノテーション、繰り返しの微調整、またはモデル ファミリ間での転送ができない狭い仮定に依存しています。さまざまなアーキテクチャやモダリティにまたがる未確認のモデルをラベルなしで迅速に評価するための、コスト効率が高く、モデルに依存しないフレームワークである MetaEvaluator を紹介します。 MetaEvaluator は、参照モデルのプールに対するメタ学習を利用して転送可能な初期化を取得し、プール全体でコストを償却しながら、モデルごとの再トレーニングの必要性を排除しながら、新しいモデルの正確な評価を可能にします。私たちの知る限り、これは完全にラベルのないデータセットで新しいモデルを評価できる、モデルに依存しない最初のフレームワークです。広範な実験により、MetaEvaluator は従来のアプローチと比較して大幅にコストを削減しながら安定した正確なパフォーマンス推定値を生成し、ラベルのないデータに対する新しいモデルのスケーラブルなベンチマークを実用化できることが示されています。
原文 (English)
Learning to Evaluate: Cost-Effective Model Evaluation on Unlabeled Data with Meta-Learning
The rapid advancement of machine learning has led to an unprecedented expansion of model ecosystems, making it increasingly difficult to assess the reliability of newly released models on unseen and unlabeled data. Existing evaluation pipelines typically rely on costly annotation, repeated fine-tuning, or assumptions that do not generalize well to new models. We introduce MetaEvaluator, a cost-effective, model-agnostic framework for fast, label-free evaluation of unseen models across diverse architectures and modalities. MetaEvaluator meta-learns over a pool of reference models to acquire an effective initialization for accurate assessment of unseen models, thereby amortizing evaluation cost and eliminating the need for per-model retraining. To the best of our knowledge, this is the first model-agnostic framework that evaluates new models on unlabeled datasets. Extensive experiments demonstrate that MetaEvaluator delivers stable and accurate performance estimates at substantially lower cost than conventional approaches, enabling scalable benchmarking on unlabeled datasets for emerging models. The code is available at: https://github.com/phkhanhtrinh23/MetaEvaluator.
グラフデータに対するネットワーク効果の微分による治療効果の推定
観察グラフデータから個人治療効果(ITE)を推定することは、商業や医療などの分野での意思決定に不可欠です。この作業は、個々の結果が近隣の治療法や共変量によって影響を受ける可能性があるため、干渉が生じるため困難です。既存の方法は、正確な ITE 推定のためにそのような干渉をモデル化しようとしています。ただし、重要な問題は見落とされがちです。それは、差異化ネットワーク効果 (DNE) です。これは、重要性と規模が異なる近隣ネットワークで構成されるローカル ネットワークによって引き起こされる効果です。 DNE をキャプチャすることは不可欠です。そうしないと、干渉の誤った特性評価により ITE 推定が不正確になり、誤った決定を招く可能性があります。この課題に対処するために、2 つの部分注意メカニズムとメッセージ増幅器を組み込んだ新しい干渉モデリング メカニズムを提案します。パーシャル アテンション メカニズムは、干渉に寄与するさまざまな隣接ノードの重要性を自動的に推定します。一方、メッセージ アンプは隣接ノードのスケールに基づいて干渉モデリング メカニズムの結果を調整します。これらすべてにより、モデルが DNE をキャプチャできるようになります。 3 つの現実世界のグラフでの実験では、私たちの方法がグラフ データから ITE を推定する既存のアプローチよりも優れていることが実証されており、DNE を明示的にキャプチャすることの重要性が裏付けられています。
原文 (English)
Treatment Effect Estimation with Differentiated Networked Effect on Graph Data
Estimating individual treatment effect (ITE) from observational graph data is crucial for decision-making in the fields such as commerce and medicine. This task is challenging due to interference, where individual outcomes can be influenced by the treatments and covariates of their neighbors. Existing methods attempt to model such interference for accurate ITE estimation. However, a critical issue is often overlooked: differentiated networked effect (DNE), an effect caused by local networks consisting of neighbors with varying importance and scales. Capturing DNE is vital; otherwise, we will end up with imprecise ITE estimation due to an erroneous characterization of interference, which can result in misguided decisions. To address this challenge, we propose a novel interference modeling mechanism that incorporates two partial attention mechanisms and a message amplifier. The partial attention mechanisms automatically estimate the importance of different neighbors in contributing to interference, while the message amplifier adjusts the results of the interference modeling mechanism based on the scale of neighbors, all of which enables the model to capture DNE. Experiments on three real-world graphs demonstrate that our methods outperform existing approaches for ITE estimation from graph data, which corroborates the importance of explicitly capturing DNE.
注意力の散漫によって引き起こされる視覚的なぼやけを修正して幻覚を軽減する: アルゴリズムと理論
マルチモーダル大規模言語モデル (MLLM) は、物体の幻覚に悩まされることがよくありますが、この失敗の根底にある視覚知覚メカニズムはまだ十分に理解されていません。この研究では、幻覚が人間のような注意散漫現象と強く関連していることを明らかにしました。この現象では、分割焦点下にある人間は視覚の明瞭度が低下し、不正確な説明を生成しますが、モデルでは同じメカニズムが、複数頭の注意における空間的な不一致と、デコード中の画像トークンへの注意の一時的な薄れとして現れます。さらに、注意の分散によってモデルの複雑さが増大し、分類の一般化が低下するという理論的な洞察も提供します。これらの発見に動機づけられて、我々は、画像認識を改善するための注意集中アプローチ(AFIP)を提案します。これは、クロスヘッド注意の強化を通じて注意の散漫を修正し、動的な歴史的注意の強化を通じて視覚の基礎を強化します。複数のベンチマークとモデルに関する広範な実験により、追加のトレーニングなしで AFIP の有効性が検証されます。
原文 (English)
Correcting Visual Blur Induced by Attention Distraction to Reduce Hallucinations: Algorithm and Theory
Multimodal large language models (MLLMs) frequently suffer from object hallucinations, yet the visual perceptual mechanism underlying this failure remains poorly understood. In this work, we reveal that hallucinations are strongly associated with a human-like attention distraction phenomenon, where humans under divided focus experience degraded visual clarity and produce inaccurate descriptions, while in models the same mechanism manifests as spatial inconsistency in multi-head attention and temporal fading of attention to image tokens during decoding. We further provide theoretical insights that attention dispersion increases model complexity and degrades classification generalization. Motivated by these findings, we propose an Attention-Focused Approach for Improved Image Perception (AFIP), which corrects attention distraction via cross-head attention enrichment and reinforces visual grounding through dynamic historical attention enhancement. Extensive experiments on multiple benchmarks and models validate the effectiveness of AFIP without additional training.
Anatomy-Anchored Self-Supervision: Distilling Vision Foundation Models for Invariant Ultrasound Representation
Self-supervised pre-training paradigm has gained increasing prominence for learning transferable representations in medical imaging, yet ex…
Grimlock: Guarding High-Agency Systems with eBPF and Attested Channels
Agentic systems increasingly run user-authored orchestration code that invokes tools, spawns subtasks, and delegates work across machines a…
アリヤバータ 2: 高度な STEM 推論のための強化学習のスケーリング
JEE や NEET などの競争力のある STEM 試験では、複数段階の記号的推論、正確な数値計算、物理、化学、数学にわたる深い概念的理解が必要です。最近の大規模な言語モデルは、共通の推論ベンチマークでは優れたパフォーマンスを発揮しますが、大規模に展開することは依然として困難であり、学生の何百万もの疑問がドメイン固有の一貫した構造の問題解決を必要としています。 Aryabhata 2 は、トレーニング後の強化学習によってトレーニングされた、競争力のある STEM 試験用の推論に焦点を当てた言語モデルです。 PhysicsWallah の内部質問バンクを使用して、高品質のトレーニング カリキュラムを構築し、検証可能な報酬を伴う強化学習を通じて GPT-OSS-20B のポストトレーニングを構築します。トレーニングでは、長期にわたる強化学習と、段階的にロールアウト グループのサイズが大きくなることで広がる探索を組み合わせます。 JEE Main、JEE Advanced、NEET などの競合試験ベンチマークと、AIME、HMMT、MMLU-Pro、MMLU-Redux 2.0、GPQA などの配布外推論データセットで Aryabhata 2 を評価します。結果は、Aryabhata 2 が競合 STEM 推論において基本モデル GPT-OSS-20B を上回るパフォーマンスを示しながら、必要な出力トークンが大幅に少なくなる (最大 64\% 少ない) ことを示しています。
原文 (English)
Aryabhata 2: Scaling Reinforcement Learning for Advanced STEM Reasoning
Competitive STEM examinations such as JEE and NEET require multi-step symbolic reasoning, precise numerical computation, and deep conceptual understanding across physics, chemistry, and mathematics. Recent large language models perform strongly on common reasoning benchmarks, yet they remain difficult to deploy at scale, where millions of student doubts demand domain-specific, consistently structured problem solving. We introduce Aryabhata 2, a reasoning-focused language model for competitive STEM examinations, trained via reinforcement-learning post-training. Using PhysicsWallah's internal question banks, we construct a high-quality training curriculum and post-train GPT-OSS-20B through reinforcement learning with verifiable rewards. Training combines prolonged reinforcement learning with broadened exploration via progressively larger rollout group sizes. We evaluate Aryabhata 2 on competitive examination benchmarks, including JEE Main, JEE Advanced, and NEET, as well as out-of-distribution reasoning datasets such as AIME, HMMT, MMLU-Pro, MMLU-Redux 2.0, and GPQA. Results show that Aryabhata 2 outperforms its base model GPT-OSS-20B on competitive STEM reasoning while requiring substantially fewer output tokens (up to 64\% fewer).
構造化プロンプトの最適化と強化学習の融合により、複雑なテキストに対するグローバルおよびローカルの解釈可能性が実現
LLM は高度なテキスト分類を備えていますが、既存のパラダイムはトレードオフに直面しています。教師付き (ラベルのみ) 微調整はスケーラブルですが、複雑なテキストに対する推論が限られており、広範なモデルの透明性に欠けています。一方、離散プロンプト最適化は人間が読める命令を提供しますが、パフォーマンスとスケーラビリティに苦労します。私たちは、3 つの段階的な段階を持つ eXTC (eXplainable Text Classifier) を導入します。(1) 新しい構造化プロンプト最適化アルゴリズムを介して、自然言語で標準操作手順 (SOP、またはルールブック) を学習します。 (2) SOP に基づいた推論を大規模な教師 LLM からコンパクトな LM に抽出します。 (3) 強化学習により、初期 SOP を超えて推論能力を拡張します。この設計により、eXTC は、(i) コンパクトな LM を介した高速推論、(ii) 学習したドメイン ルールのグローバルなモジュール式説明と並行した推論時のローカル推論トレースを提供できるようになり、(iii) 分類パフォーマンスと説明品質の両方において、さまざまなベンチマークにわたって既存のパラダイムを大幅に上回り、段階ごとに向上します。
原文 (English)
Structured Prompt Optimization Meets Reinforcement Learning for Global and Local Interpretability over Complex Text
LLMs have advanced text classification, yet existing paradigms face a trade-off: supervised (label only) fine-tuning is scalable but offers limited reasoning on complex text and lacks broader model transparency, while discrete prompt optimization offers human-readable instructions but struggles with performance and scalability. We introduce eXTC (eXplainable Text Classifier) with three progressive stages: (1) learning a Standard Operating Procedure (SOP, or rulebook) in natural language via a new Structured Prompt Optimization algorithm; (2) SOP-grounded reasoning distillation from a large teacher LLM into a compact LM; and (3) expanding reasoning capabilities beyond the initial SOP via reinforcement learning. This design enables eXTC to provide (i) fast inference via a compact LM, with (ii) inference-time local reasoning traces, alongside a global, modular explanation of its learned domain rules, while (iii) significantly outperforming existing paradigms across diverse benchmarks in both classification performance and explanation quality, with stage-by-stage gains.
LoopFM: Learning frOm HistOrical RePresentations of Foundation Model for Recommendation
Knowledge distillation (KD) transfers a single scalar prediction from a large foundation model (FM) to compact vertical models (VMs), suffe…
Towards Verifiable Multimodal Deep Research: A Multi-Agent Harness for Interleaved Report Generation
Large Language Models (LLMs) have advanced autonomous agents from deep search, which retrieves concise factual answers, to deep research, w…
Label Over Logic? How Source Cues Bias Human Fallacy Judgments More Than LLMs
As AI-generated and AI-assisted content floods online spaces, source labels attached to such content can distort human reasoning judgments,…
No More K-means: Single-Stage Sparse Coding for Efficient Multi-Vector Retrieval
Multi-vector retrieval (MVR) models, exemplified by ColBERT, have established new benchmarks in retrieval accuracy by preserving fine-grain…
BenHalluEval: A Multi-Task Hallucination Evaluation Framework for Large Language Models on Bengali
Despite Bengali being the sixth most spoken language in the world, no prior work has systematically evaluated hallucination in large langua…
Beyond Tool Adoption: A Practical Five-Stage Developmental Continuum for AI Literacy in Higher Education
We propose a five-stage AI Literacy Continuum for higher education consisting of Not Yet Engaged, Uncritical Use, Informed Use, Critical Ev…
SkyShield: Occupancy as a Safety Interface for Low-Altitude UAV Autonomy
For low-altitude Unmanned Aerial Vehicle (UAV) autonomy, 3D spatial understanding is not merely a perception objective, but the safety inte…
Data Collection for Training Quality-Control AI in Carpet Manufacturing
Visual inspection remains the dominant quality-control practice in woven and tufted carpet production, yet it is slow, subjective, and inco…
memorywire: A Vendor-Neutral Wire Format for Agent Memory Operations
Agent-memory frameworks -- mem0, Letta/MemGPT, Cognee, Zep/Graphiti, MemoryOS, MemTensor -- each ship their own SDK, storage layout, and op…
DiscourseFlip: An Oblique Discourse-Level Opinion Manipulation Attack against Black-box Retrieval-Augmented Generation
Retrieval-Augmented Generation (RAG) systems are widely deployed and increasingly influential, but their reliance on external corpora expos…
Adaptive Auto-Harness: Sustained Self-Improvement for Agentic System Deployment on Open-Ended Task Streams
Auto-harness systems such as A-Evolve, GEPA, and Meta-Harness improve LLM agents by optimizing prompts, skills, tools, memories, and suppor…
AutoForest: Automatically Generating Forest Plots from Biomedical Studies with End-to-End Evidence Extraction and Synthesis
Systematic reviews rely on forest plots to synthesise quantitative evidence across biomedical studies, but generating them remains a fragme…
Too Much of a Good Thing: When sim2real Efforts Impede Policy Learning (And What to Do About It)
While sim2real efforts are necessary for effective policy transfer to hardware, there is such a thing as too much of a good thing. We argue…
Anomalies in Multivariate Time Series Benchmarks Are Mostly Univariate
Many recent multivariate time series anomaly detection (MTSAD) models incorporate cross-channel modeling, under the implicit assumption tha…
Scalable Uncertainty Quantification for Extreme Weather Forecasting via Empirical Neural Tangent Kernels
Deep learning weather models now match numerical weather prediction accuracy while running orders of magnitude faster, but produce determin…
OpenAgenet/OAN: Open Infrastructure for Trusted Agent Interconnection
OpenAgenet, abbreviated as OAN, is an open infrastructure project for trusted Agent interconnection. It addresses a problem that becomes vi…
OpenAgenet/OAN: Technical Architecture for Trust-Governed Agent Identity and Discovery
This paper describes the technical architecture of OpenAgenet / OAN. OAN is a protocol-neutral trust layer for open Agent interconnection.…
Reinforcement Learning from Cross-domain Videos with Video Prediction Model
Reinforcement learning from expert videos across visually distinct domains is challenging due to the absence of reward signals and the pres…
Generalizing Graph Foundation Models via Hyperbolic Retrieval-Augmented Generation
Graph foundation models (GFMs) emerged as a dominant paradigm in graph representation learning by leveraging large-scale pre-training for c…
Implement Kubernetes Pod-Level Remote Attestation for Confidential Workloads on dstack
The rise of LLM-as-a-Service and other confidential cloud workloads demands cryptographic proof that user data is processed in a trusted, u…
P$^2$-DPO: Grounding Hallucination in Perceptual Processing via Calibration Direct Preference Optimization
Hallucination has recently garnered significant research attention in Large Vision-Language Models (LVLMs). Direct Preference Optimization…
Optimizing Explicit Unit-Distance Lower-Bound Certificates
The 2026 disproof of Erd\H{o}s's unit-distance conjecture and Sawin's subsequent explicit quantitative refinement show that the maximum num…
CR-Seg: Attention-Guided and CoT-Enhanced Coarse-to-Refined Reasoning Segmentation
Reasoning segmentation aims to segment target objects described by complex language through joint visual-textual reasoning. Existing method…
PHASER: Phase-Aware and Semantic Experience Replay for Vision-Language-Action Models
Vision-Language-Action (VLA) models have achieved remarkable success in language-conditioned robotic manipulation. However, deploying these…
Testing LLM Arithmetic Reasoning Generalization with Automatic Numeric-Remapping Attacks
Large language models achieve strong performance on arithmetic reasoning benchmarks, and one common response to arithmetic brittleness is t…
AnchorMoE: Interpretable Time Series Classification via Anchor-Routed MoE
Multivariate time series classification (MTSC) is pivotal in high-stakes domains, such as clinical diagnosis and industrial fault detection…
Qwen-Image-Flash: Beyond Objective Design
Few-step distillation has become an effective strategy for accelerating advanced visual generative models, yet prior work has largely focus…
Consistency Training Can Entrench Misalignment
Consistency training encourages a model to produce similar outputs across related inputs or sampling procedures. Such methods are simple, s…
Synthesize and Reward -- Reinforcement Learning for Multi-Step Tool Use in Live Environments
Training LLMs to orchestrate multi-step tool calls is held back by three coupled obstacles: realistic stateful execution environments are c…
q0: Primitives for Hyper-Epoch Pretraining
Multi-epoch training is becoming the standard now that compute is growing faster than the supply of high-quality text. But pretraining a si…